Содержание
Код для Arduino управления драйвером A4988 (DRV8825)с использованием библиотеки AccelStepper.
Управление шаговым двигателем без библиотеки идеально подходит для простых проектов на Arduino с одним двигателем. Но если вы хотите управлять несколькими шаговыми двигателями, вам понадобится библиотека. Итак, для нашего следующего примера будем использовать библиотеку шаговых двигателей под названием AccelStepper library.
AccelStepper library поддерживает.
Ускорение и замедление. Несколько одновременных шаговых двигателей с независимыми одновременными шагами на каждом шаговом двигателе. Эта библиотека не включена в IDE Arduino, поэтому вам необходимо сначала установить ее.
Установка библиотеки AccelStepper.
Чтобы установить библиотеку, перейдите в «Скетч» -> «Подключить библиотеку» -> «Управление» библиотеками. Подождите, пока диспетчер библиотек загрузит индекс библиотек и обновит список установленных библиотек.
Отфильтруйте свой поиск, набрав «Accelstepper». Щелкните первую запись и выберите «Установка».
Код Arduino с использованием библиотеки AccelStepper.
Вот простой пример, который ускоряет шаговый двигатель в одном направлении, а затем замедляется до полной остановки. Как только двигатель делает один оборот, меняет направление вращения. Данный цикл повторяется снова и снова.
// Подключаем библиотеку AccelStepper #include <AccelStepper.h> // Устанавливаем выводы const int dirPin = 2; const int stepPin = 3; int i = 0; // Определение тип интерфейса двигателя #define motorInterfaceType 1 // Создаем экземпляр AccelStepper myStepper(motorInterfaceType, stepPin, dirPin); void setup() { // Устанавливаем максимальную скорость, коэффициент ускорения, // начальную скорость и целевую позицию myStepper.setMaxSpeed(1000); myStepper.setAcceleration(50); myStepper.setSpeed(200); myStepper.moveTo(100); } void loop() { // Изменение направления вращения, когда двигатель достигнет заданного положения if (myStepper.distanceToGo() == 0) { myStepper.moveTo(-myStepper.currentPosition()); } // Передвинуть на 1 шаг myStepper.run(); }
Пояснение к коду:
Подключаем библиотеку AccelStepper.
#include <AccelStepper.h>
Дальше определяем выводы Arduino, к которым подключаются
выводы
STEP и DIR A4988. Мы также
устанавливаем
motorInterfaceType на 1. (1 означает внешний шаговый драйвер с
выводами
Step и Direction).
const int dirPin = 2; const int stepPin = 3; int i = 0; // Определение тип интерфейса двигателя #define motorInterfaceType 1
Затем мы создаем экземпляр библиотеки под названием myStepper.
// Создаем экземпляр AccelStepper myStepper(motorInterfaceType, stepPin, dirPin);
В функции настройки мы сначала устанавливаем максимальную скорость
двигателя равной тысяче. Затем мы устанавливаем коэффициент ускорения для
двигателя, чтобы добавить ускорение и замедление к движениям шагового
двигателя. Дальше устанавливаем обычную скорость 200 и количество шагов,
которое мы собираемся переместить, например, 200 (поскольку NEMA 17 делает 200
шагов за оборот).
void setup() {
myStepper.setMaxSpeed(1000);
myStepper.setAcceleration(50);
myStepper.setSpeed(200);
myStepper.moveTo(100);
}
В основном цикле loop() используем оператор if, чтобы
проверить, как далеко двигателю нужно проехать (путем чтения свойства
distanceToGo), пока он не достигнет целевой позиции (установленной moveTo). Как
только
distanceToGo достигнет нуля, поменяем направление вращения двигателя в
противоположном направлении, изменив значение
moveTo на отрицательное по
отношению к его текущему значению. Теперь вы заметите, что в конце цикла мы
вызвали функцию
run (). Это самая важная функция, потому что шаговый двигатель
не будет работать, пока эта функция не будет выполнена.
void loop() {
if (myStepper.distanceToGo() == 0)
myStepper.moveTo(-myStepper.currentPosition());
myStepper.run();
}
Это небольшой пример использования библиотеки AccelStepper. В следующем уроке подробнее рассмотрим данную библиотеку и сделаем пару классных примеров использования шаговых двигателей в Arduino проектах.
Понравился Урок 2. Как подключить A4988 (DRV8825) к Arduino? Скетч, библиотека? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу , в группу на .
Спасибо за внимание!
Технологии начинаются с простого!
Фотографии к статье
Файлы для скачивания
Скачивая материал, я соглашаюсь с
Правилами скачивания и использования материалов.
| Код вращения шагового двигателя NEMA 17, драйвер A4988, DRV8825 без использования библиотеки.ino | 1 Kb | 230 | Скачать | |
| Код вращения шагового двигателя NEMA 17, драйвер A4988, DRV8825 без использования библиотеки.ino | 1 Kb | 183 | Скачать | |
| библиотека AccelStepper.zip | 86 Kb | 190 | Скачать |
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
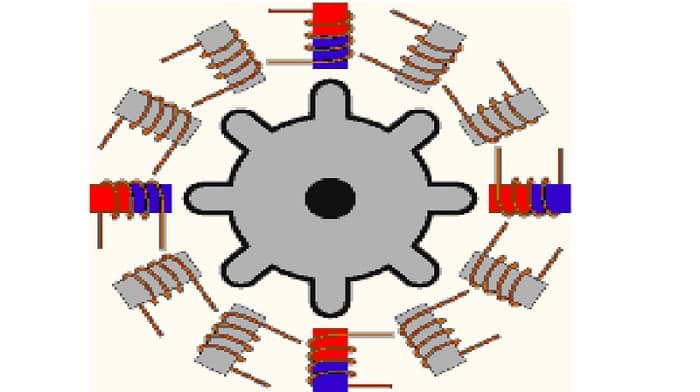 С переменным магнитным сопротивлением
С переменным магнитным сопротивлением
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
 С постоянным магнитом
С постоянным магнитом
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
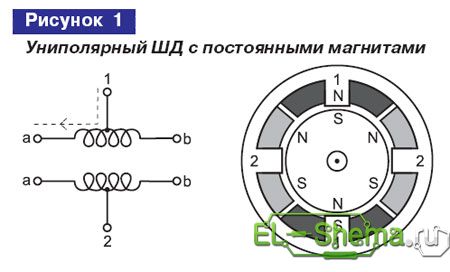
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
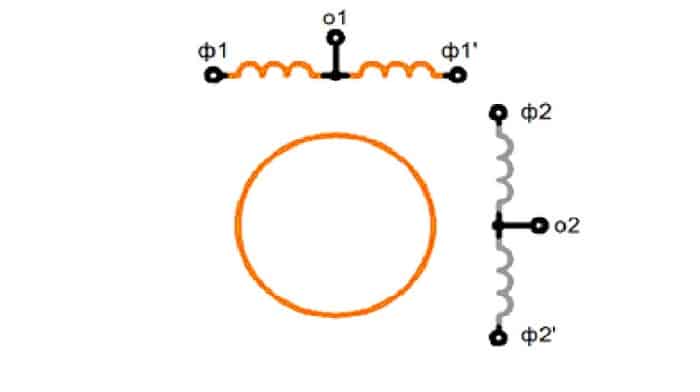 Униполярный ШД
Униполярный ШД
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
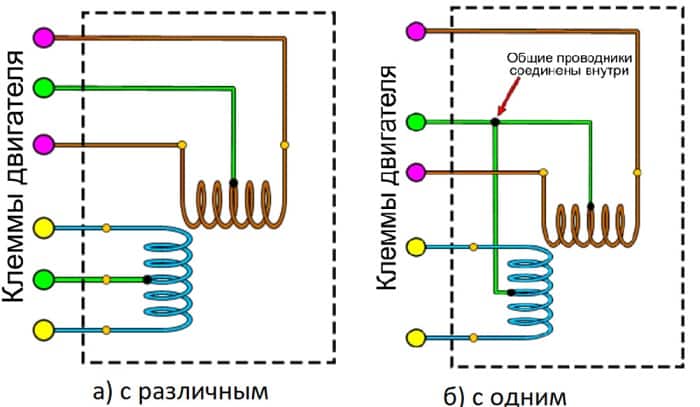 Схема а) с различными, б) с одним выводом
Схема а) с различными, б) с одним выводом
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
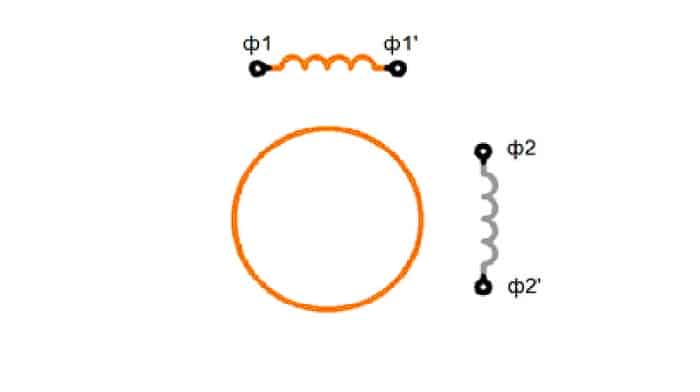 Биполярный шаговый двигатель
Биполярный шаговый двигатель
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
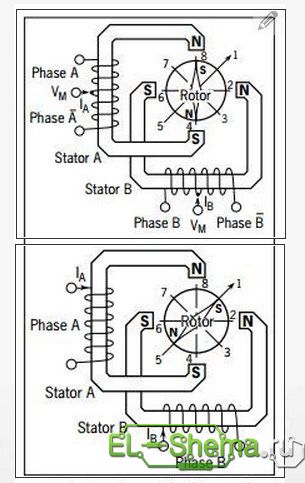
Цикл работы
Чтобы привести в движение трёхфазный двигатель, нужно рассмотреть цикл его работы за электрический оборот. Итак, имеем три фазы — A, B, C. Каждая из фаз получает положительную и отрицательную полярности в определённый момент времени. Поочерёдно по шагам пропускается ток от «плюса» одной фазы к «минусу» другой фазы. В итоге получается шесть шагов = три фазы × две полярности.
A+, A–, B+, B–, C+, C–
Рассмотрим эти шесть шагов цикла. Предположим, что положение ротора установлено в точке первого шага, тогда с датчиков Холла мы получим код вида 101, где 1 — фаза А, 0 — фаза B, 1 — фаза С. Определив по коду положение вала, нужно подать ток на соответствующие фазы с заданными полярностями. В результате вал проворачивается, датчики считывают код нового положения вала — и т. д.
В таблице указаны коды датчиков и смена комбинаций фаз для большинства электродвигателей. Для обратного хода колеса (реверса) достаточно перевернуть знаки полярности фаз наоборот. Принцип работы двигателя довольно прост.
Цикл двигателя представлен в gif-анимации.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
Двигатели переменной индуктивности
используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
Двигатели с постоянными магнитами
похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор
— это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Также существует ещё два типа шаговых двигателей: униполярные
и биполярные
. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса — положительный и отрицательный.
То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.

Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8. 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
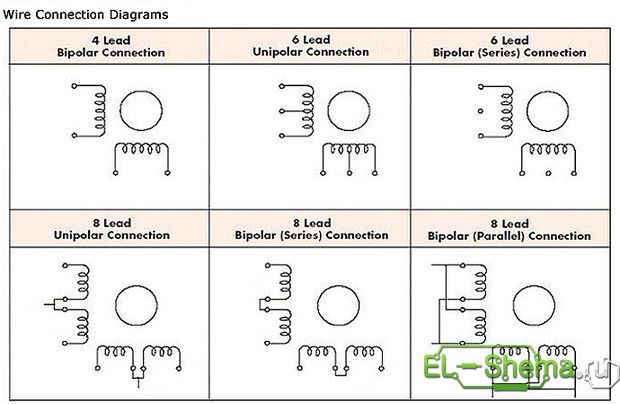
5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
Есть несколько различных способов управления шаговыми двигателями — полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
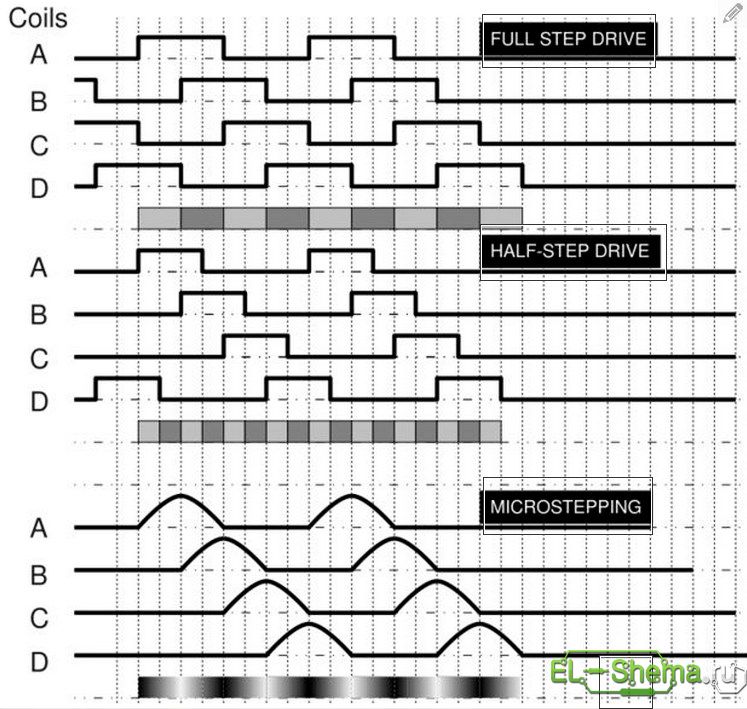
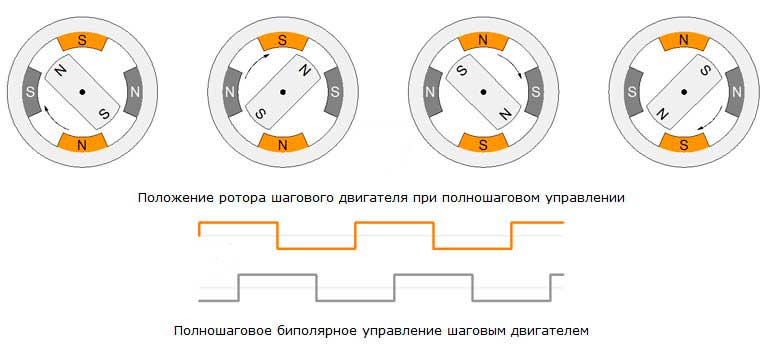
Полный шаг
— такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
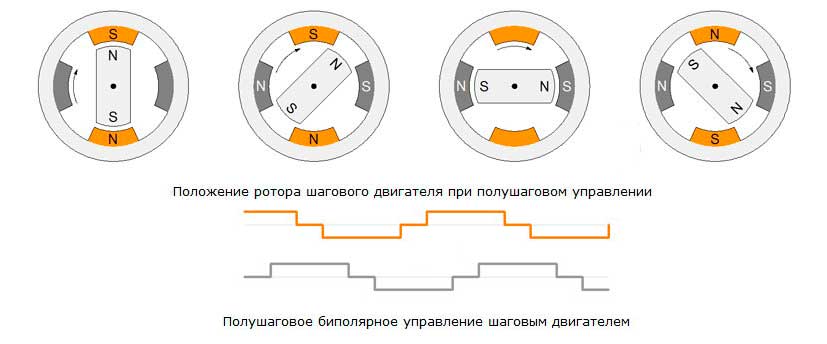
Полшага
. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг — поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый
имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Описание библиотеки для работы с шаговым двигателем
В среде разработки Ардуино IDE существует стандартная библиотека Strepper.h для написания программ шаговых двигателей. Основные функции в этой библиотеке:
- Stepper(количество шагов, номера контактов). Эта функция создает объект Stepper, которая соответствует подключенному к плате Ардуино двигателю. Аргумент – контакты на плате, к которым подключается двигатель, и количество шагов, которые совершаются для полного оборота вокруг своей оси. Информацию о количестве шагов можно посмотреть в документации к мотору. Вместо количества шагов может быть указан угол, который составляет один шаг. Для определения числа шагов, нужно разделить 360 градусов на это число.
- Set Speed(long rpms) – функция, в которой указывается скорость вращения. Аргументом является положительное целое число, в котором указано количество оборотов в минуту. Задается после функции Step().
- Step(Steps) –поворот на указанное количество шагов. Аргументом может быть либо положительное число – поворот двигателя по часовой стрелке, либо отрицательное – против часовой стрелки.
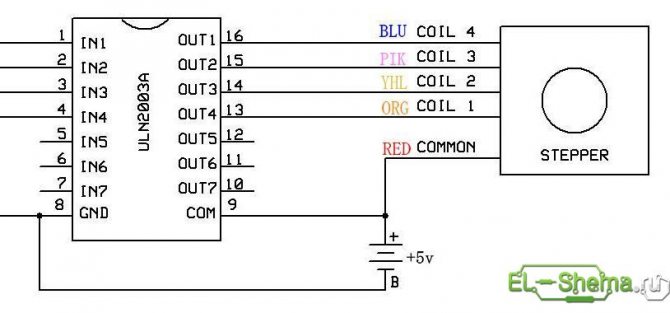
Схема подключения шаговых двигателей
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
Originally posted 2018-11-23 11:47:42. Republished by Blog Post Promoter
Типы двигателей по конструкции ротора
https://youtube.com/watch?v=r_V8vIuEPws
Шаговые двигатели делятся зависимо от типа устройства ротора Зависимо от того, какой ротор используют в конкретном устройстве, моторы можно разделить на следующие виды:
- с установленным магнитом;
- с альтернирующим магнитным противодействием;
- гибридные.
Шаговые двигатели с установленными магнитами на роторе аналогичны тем, о которых мы говорили ранее.
Есть разница только в одном аспекте: в настоящем устройстве магнитов очень много. Они расположены на одном диске.
Численность полюсов в нынешних двигателях достигает сорока восьми. Одна поступь в данном моторе равен семь с половиной градусов. Неплохо, да?
Шаговые двигатели с альтернирующим магнитным противодействием. Такой тип ротора в своей конструкции имеет мягкие магнитные сплавы, их так же именуют «реактивными шаговыми моторами».
Ротор состоит из дискретных пластин и в разрезе имеет вид зубчатого колеса.
Подобная схема строения нужна с той целью, что это позволяет замкнуть магнитный поток через зубцы колеса.
Преимущество данного типа мотора состоит вот в чем: здесь нет ничего, что затормозило бы работу двигателя. Соль в том, что ротор с установленными магнитами притягивается к частям двигателя, которые состоят из металла.
Обеспечить непрерывную работу шагового двигателя без напряжения практически невозможно. Но данный тип устройства эту проблему решил на корню. Но имеется и слабое место, а именно — маленький крутящий момент. Это значит, что одна поступь такого мотора будет равна от пяти до пятнадцати градусов.
Гибридный тип двигателя соединил оптимальные качества предшествующих. У них маленький шаг ( девять десятых – пять градусов), высокий момент и удерживающая способность. Главной фишкой тут мы считаем максимальную точность работы аппарата.
Этот двигатель используют в новых устройствах, где точность ставят первоочередной задачей. Но, есть одно «но» — цена.
За такое удовольствие придется дорого платить. Схематично такой ротор можно описать как цилиндр с магнитными свойствами, который имеет мягкомагнитные зубцы.
Проследим закономерность на деле: возьмем шаговый двигатель на двести шагов. Для него нужно два зубчатых диска, по пятьдесят зубцов.
Наш диск смещается на ползуба, таким образом, проем положительного полюса попадает на шип негативно заряженного . Итого, оказывается сто полюсов с обратной полярностью.
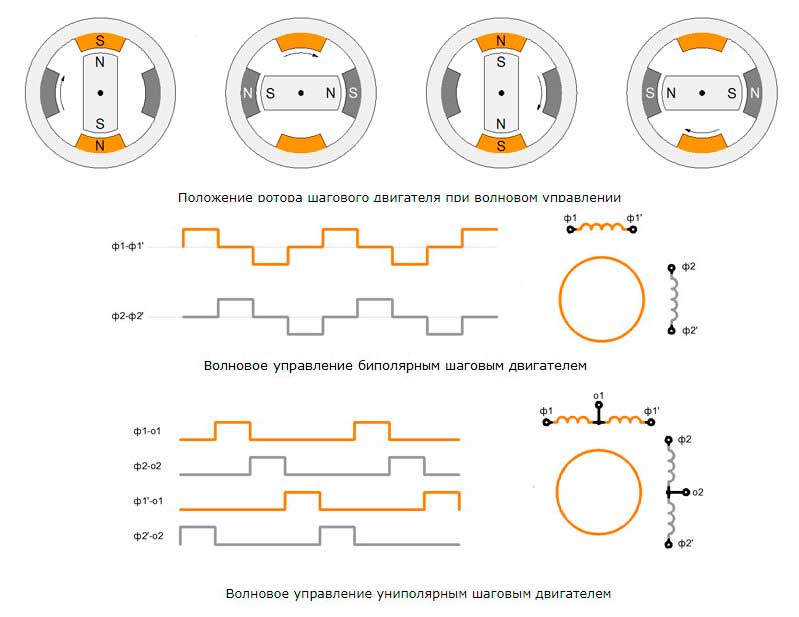
Методы управления шаговым мотором:
- Волновой. При таком типе управления напряжение поступает на одну из катушек, к ней притягивается ротор. Но такой вариант высокую мощность обеспечить не сможет.
- Полношаговое координирование осуществляется следующим образом: обе обмотки задействованы сразу, соответственно мощность будет высокой.
- Полушаговый. Это смесь из предыдущих двух методов. При таком типе управления напряжение идет поочередно: на одну обмотку, а потом – на обе. Таким образом, мы получим много шагов, высокую мощность, а так же в случае чрезмерного разгоне срабатывает удерживающая сила, которая тормозит мотор, когда это необходимо.
- Микрошаговое управление осуществляется с микроступенчатых импульсов. Это обеспечивает плавную работу мотора.
Драйвер шагового двигателя
Краткое введение в теорию и типы драйверов, советы по подбору оптимального драйвера для шагового двигателя.
Некоторые сведения, которые могут помочь вам выбрать драйвер шагового двигателя.
Шаговый двигатель – двигатель со сложной схемой управления, которому требуется специальное электронное устройство – драйвер шагового двигателя.
Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. >Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach3 или LinuxCNC.
Задача драйвера – изменять ток в обмотках как можно более эффективно, а поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т.п.
Типы (виды) драйверов ШД
Драйверы делятся по способу закачки тока в обмотки на несколько видов:1) Драйверы постоянного напряжения
Эти драйверы подают постоянный уровень напряжения поочередно на обмотки, результирующий ток зависит от сопротивления обмотки, а на высоких скоростях – и от индуктивности. Эти драйверы крайне неэффективны, и могут быть использованы только на очень малых скоростях.
2) Двухуровневые драйверы
В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны, помимо прочего они снижают нагрев двигателей, и их все еще можно иногда встретить в высококлассном оборудовании. Однако, такие драйверы поддерживают только режим шага и полушага.
3) Драйверы с ШИМ.
На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны, практически все драйверы на рынке – этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако, ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.
Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т.п.
Реактивные шаговые двигатели
У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
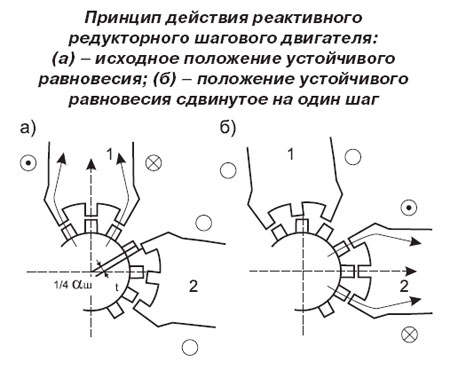
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определится выражением:
αш=360/КтZр
В выражении для KT величину n2 следует брать равной 1, т.к. изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Индукторные (гибридные) шаговые двигатели. Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики
Типы и конструктивные особенности
Сегодня применяется несколько видов ШД, отличающихся по конструкции, типу обмоток, особенностям управления и иным параметрам. Рассмотрим каждую классификацию более подробно.
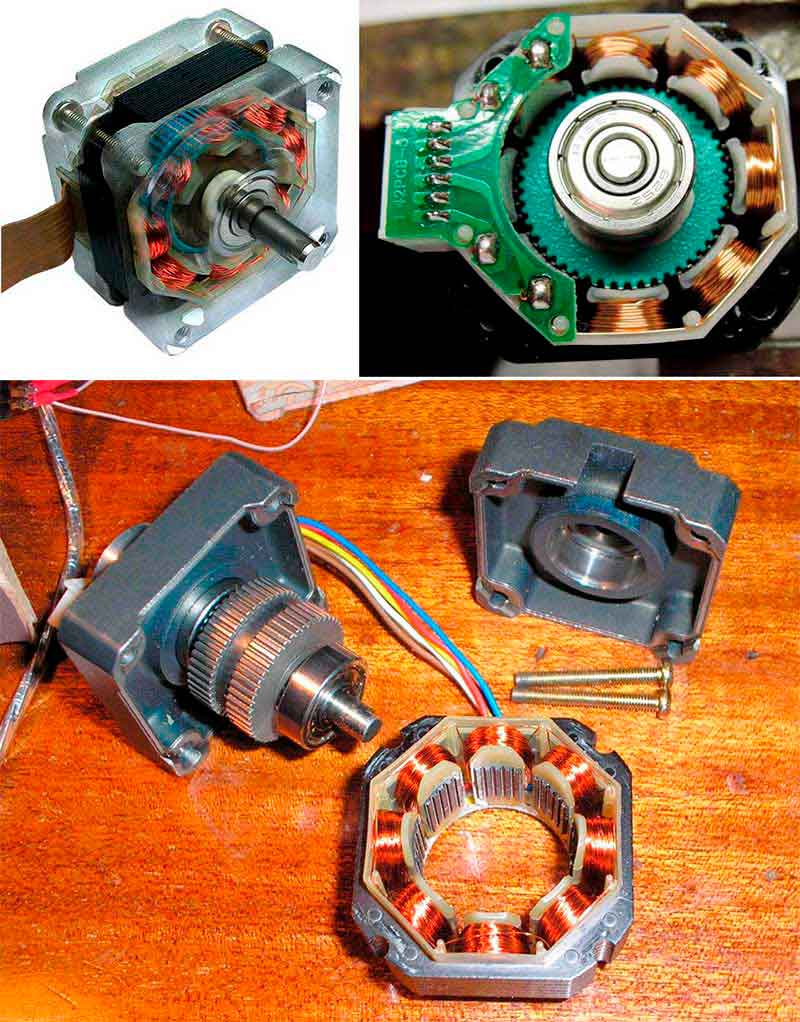
По конструкции ротора
Многие характеристики двигателя, касающиеся скорости вращения и режима работы, зависят от ротора.
С этой позиции выделяется три вида устройства.
Реактивный (синхронный). Особенность — отсутствие роторного магнита. Конструктивно изготавливается из специальных сплавов, позволяющих снизить индуктивные потери. Устройство имеет вид шестеренки с зубцами, а на полюсах статора подается напряжение со второй пары. Как результат, создается магнитная сила для перемещения ротора. По принципу действия реактивный шаговый агрегат имеет много общего с синхронным мотором, где поля ротора и статора вращаются в одном направлении. 
- Двигатель с магнитами. В отличие от прошлого устройства подвижный элемент комплектуется постоянным магнитом с двумя и более полюсами. Ротор крутится, благодаря притягиванию и отталкиванию полюсов с помощью электрического поля в момент подачи разницы потенциалов на определенные обмотки.
- Смешанные. В гибридных устройствах совмещаются лучшие качества магнитных и реактивных моторов. В отличие от прошлых моделей угол и шаг здесь меньше. Конструктивно ротор оборудован постоянным магнитом, имеющим цилиндрическую форму. Внешне он имеет вид двух полюсов с круглым сечением, на поверхности которых находятся роторные зубцы. Такая особенность гарантирует хороший момент вращения и удерживания. Главные плюсы — максимальная плавность, точность и скорость перемещения.
По типу обмоток
Плавность функционирования шагового двигателя находится в прямой зависимости от числа обмоток, поэтому на этот фактор важно обращать особое внимание

Многие ошибочно считают, что количество обмоток зависит от числа фаз. Это не так, ведь даже 2-фазный мотор может иметь четыре и более обмотки.
Шаговые двигатели бывают:
- Униполярными. Особенность — наличие отпайки из средней точки, что позволяет с легкостью менять полюса. Минус состоит в применении части витков, поэтому уменьшается момент вращения. Для повышения мощности средний вывод подключать не рекомендуется. Конструктивно униполярные устройства содержат пять и шесть выводов.
- Биполярный. К этой группе относится шаговый двигатель, подключаемый к контроллеру через четыре отпайки. Обмотки могут объединятся в параллель или последовательно. Для изменения направления тока применяются так называемые чипы, обеспечивающие ручное управление. Достижение такого эффекта доступно с помощью Н-моста. Если сравнивать с униполярным видом, биполярный тип гарантирует тот же момент, но при меньших размерах.
По типу управления
Для расширения функционала и удобства применения предусмотрена система управления.
Она бывает следующих типов.
Волновая: возбуждение только одной обмотки. Недостатком является минимально доступный момент.
Полношаговая: одновременное включение обмоток.
Полушаговая: делание геометрии шагового мотора пополам. Обеспечивается увеличенное разрешение при позиционировании вала агрегата.
По типу
При выборе шаговых двигателей нужно понимать, что они бывают нескольких типов.
Кратко рассмотрим их особенности:
- Биполярные двигатели — двухфазные с угловым перемещением в 0,9 или 1,8 градуса. Разработчики гарантируют высокую точность шага без нагрузки величиной до 5%.
- С энкодером (часто называются гибридными серводвигателями). Особенность состоит в наличии инкрементального энкодера. Моторы объединяют лучшие качества серво- и шаговых электрических моторов, а цена таких устройств меньше в сравнении с сервосистемой. Применяются в комплексе с контроллером.
- Линейные (актуаторы). Принцип действия построен на преобразовании вращательного движения в линейное. Иными словами, в них сочетается винтовая передача и ШД, объединенные в общем блоке.
- Шаговые двигатели с редуктором. Применяются в ситуации, когда необходимо получить максимальное усилие на валу электрического привода с минимальной скоростью вращения. В роли редуктора используется планетарный тип, оборудованный прямозубыми шестеренками с небольшим люфтом передачи.
На рынке представлен большой выбор устройств, имеющих индивидуальные характеристики и подходящих для определенных сфер деятельности. Эти моменты необходимо учитывать при выборе модели.

Чем отличается синхронный двигатель от асинхронного для чайников кратко, простыми словами, сравнение по конструкции и принципу действия
Похожие записи:
 Как убрать мелкие и глубокие царапины на стекле?
Как убрать мелкие и глубокие царапины на стекле?
 Радиосхемы схемы электрические принципиальные
Радиосхемы схемы электрические принципиальные
 Каркасный дом своими руками: пошаговая инструкция сборки с фото
Каркасный дом своими руками: пошаговая инструкция сборки с фото
 Как открыть консервную банку со шпротами открывалкой, консервным ножом и другими способами
Как открыть консервную банку со шпротами открывалкой, консервным ножом и другими способами
 Механизм подъема, опускания и регулирования дозатора
Механизм подъема, опускания и регулирования дозатора
 Расчет забора из профнастила: калькулятор онлайн!
Расчет забора из профнастила: калькулятор онлайн!