Содержание
Магнитная левитация на постоянных магнитах: идеи и опыты
Самый простой и наглядный пример магнитной левитации, которая создается на постоянных магнитах – это так называемый левитрон. Эту игрушку придумал американский изобретатель почти 30 лет назад. В основе конструкции всего два кольцевых магнита. Большой лежит строго горизонтально, а маленький вращается и зависает над ним. Что же его удерживает от падения? За счет чего достигается такой эффект? Игорь Белецкий высказывает на видео идеи практической реализации левитрона и проводит опыты.
Естественно, постоянные магниты направлены друг к другу одноименными полюсами, что и заставляет их отталкиваться. Но для устойчивой магнитной левитации этого мало. Большой кольцевой магнит создает особую форму магнитного поля. Другими словами образуется магнитная впадина или потенциально яма, на дне которой волчок и находят свою устойчивость. Но это всего лишь позволяет ему не свалиться в сторон. Решающим фактором для стабильной левитации является вращение самого волчка, вследствие чего возникает в гироскопический эффект, благодаря нему волчок не опрокидывается, хотя постоянно к этому стремится, и как только трение а воздух притормозит его вращение, сила магнитного притяжения возьмет верх. Было бы заманчиво найти практическое применение такому подвесу. Например, сделать бесконтактный маховик – накопителя энергии. Но беда в том, что что по схеме левитрона, когда большой магнит удерживает маленький, не получается подвесить массивное тело. Сила отталкивания крайне мала – жалкие 30 грамм. Это предел. Нагрузишь больше и система сложится, а увеличивать габариты магнита непрактично и дорого. Но как же так? Неодимовые магниты обладают просто чудовищной силой отталкивания, и это действительно так.
Продаются магниты дешевле в этом китайском магазине. Автор видео Игорь Белецкий попытался реализовать динамическую левитацию по принципу магнитного подвеса, расположив ось вращения вертикально.Вес маховика легко компенсируется двумя маленькими кольцевыми магнитами, а вот осевую стабилизацию должны были обеспечить небольшие магниты на концах оси. Плюс гироскопический эффект от вращения самого маховика. К сожалению, проведя множество экспериментов, он так и не добился желаемого. Возможно, он снова выбрал не самую удачную схему, потому что, чем больше в системе магнитов, а значит и напряжений, тем сложнее ее уравновесить.
Самый простой и дешевый способ магнитного подвеса предложил еще профессор механики Нурбей Гулия. Он просто перенес всю массу маховика на кольцевые магниты, а осевую стабилизацию оставил за обычными подшипниками, что вполне логично, ведь при вертикальной оси вращения нагрузка на них минимальная, как и потери на трение. Это, конечно, не чистая левитация, но что то весьма близкое. Автор ролика быстро собрал похожую конструкцию и убедился в ее практичности. Вместо подшипников для стабилизации оси он использовал графитовые втулки. Трение у них действительно минимально. Теперь бы еще поместить всё в безвоздушную капсулу и получится настоящий накопитель механической энергии. А потом, для полного счастья, было бы логично сделать бесконтактный отбор мощности. Самый простой способ – превратить маховик в магнитный ротор. Например, добавим катушку индуктивности и получим генератор, который при необходимости сможет работать и как электромотор для раскрутки маховика накопителя. Но это уже совсем другая история.
Посмотрите товары для изобретателей. Ссылка на магазин.
Невозможность левитации в статическом электромагнитном поле
Согласно теореме Ирншоу, являющейся прямым следствием закона Гаусса, левитация статических объектов в статическом электромагнитном поле в вакууме невозможна. Теорема применима не только к точечным зарядам, но и к протяженным упругим телам и говорит, что их свободный подвес в электростатическом, магнитостатическом и (или) гравитационном поле будет всегда неустойчив. Теорема Ирншоу не применима к диамагнетикам, а также в электростатическом поле к телам, у которых диэлектрическая проницаемость меньше, чем у окружающей среды.
Тем не менее, в переменном поле электростатической квадрупольной линзы левитация возможна, например, заряженных пылинок, хотя при этом не обеспечивается стабилизация положения пылинок вдоль оси линзы, поскольку равновесие по этому направлению безразличное. Электростатическая фокусировка переменным электрическим полем применяется при фокусировке пучков заряженных частиц и по своей сути аналогична «маятнику Капицы».
Основные типы магнитной левитации
Магнитное давление на объект, подлежащий «парению», осуществляется несколькими способами. Выделяют два типа подобной левитации:
- EMS – электромагнитные конструкции;
- EDS – электродинамические устройства.
Система EMS отличается нестабильным равновесным положением. Для обеспечения стабильности необходимо применять АСУ (автоматизированные системы управления) и осуществлять постоянный контроль. Притягивающая сила возникает между проводником из ферромагнетика и электрическими магнитами.
Системы типа EDS базируются на принципах появления вихревых токов в проводящих компонентах. Для того чтобы вихревые токи появились, необходимо действие переменного поля магнитной природы.
Важно! Системы EDS делятся на два вида взаимодействия. Первый – стационарные катушки вступают во взаимосвязь с магнитами, имеющими сверхпроводимость. Второй – изменения магнитных полей (МП) происходят в результате действия сил, которые генерирует переменный ток
Второй – изменения магнитных полей (МП) происходят в результате действия сил, которые генерирует переменный ток.
Силы отталкивания, которые используются в электродинамических системах, делают их инертно стабильными.
Постоянные магниты никогда не используются самостоятельно, только в гибридных установках. Это связано с тем, что постоянный магнит не может обеспечить стабильного положения ни в одной из степеней свободы, значит, без поддержки других сил воздействия на статичность положения тут не обойтись.
Интересно. Чтобы уйти от привязки к объектам из магнитных материалов и позволить системам работать с элементами другой структуры материалов, есть необычное решение – использование магнитных вставок (посредников).
Основа домашнего ветрогенератора
Тема изготовления и установки самодельных ветряных генераторов очень широко представлена в сети Интернет. Однако большая часть материала – это банальное описание принципов получения электрической энергии от природных источников.
Теоретическая методика устройства (установки) ветрогенераторов уже давно известна и вполне понятна. А вот как обстоят дела практически в бытовом секторе – вопрос, раскрытый далеко не полностью.
Чаще всего в качестве источника тока для самодельных домашних ветрогенераторов рекомендуют выбирать автомобильные генераторы или асинхронные двигатели переменного тока, дополненные неодимовыми магнитами.
Процедура переделки асинхронного электродвигателя переменного тока под генератор для ветряка. Заключается в изготовлении «шубы» ротора из неодимовых магнитов. Крайне сложный и долговременный процесс
Однако оба варианта требуют существенной доработки, нередко сложной, дорогостоящей, отнимающей много сил и времени. Куда проще и легче во всех отношениях установить электродвигатели, подобные тем, что выпускались прежде и выпускаются теперь фирмой Ametek (пример) и другими.
Для домашней ветрогенераторной установки подходят моторы постоянного тока напряжением 30 – 100 вольт. В режиме генератора от них можно получить примерно 50% от заявленного рабочего напряжения.
Следует отметить: при работе в режиме генерации электродвигатели постоянного тока требуется раскручивать до скорости выше номинальной. При этом каждый отдельно взятый мотор из десятка одинаковых экземпляров, может показывать совершенно разные характеристики.
Поэтому оптимальный подбор электродвигателя к домашнему ветрогенератору логичен при следующих показателях:
- Высокий параметр рабочего напряжения.
- Низкий параметр RPM (угловая скорость вращения).
- Высокое значение рабочего тока.
Так, удачным под установку выглядит мотор производства фирмы Ametek с рабочим напряжением 36 вольт и угловой скоростью вращения — 325 об/мин. Именно такой электродвигатель используется в конструкции ветрогенератора – установки, что описана ниже в качестве примера домашнего ветряка.
Мотор постоянного тока для домашнего ветрогенератора. Оптимальный вариант из числа продуктов, изготовленных фирмой Ametek. Также удачно подходят подобные электродвигатели производства других фирм
Проверить эффективность любого похожего мотора несложно. Достаточно подключить к электрическим выводам обычную автомобильную лампу накаливания на 12 вольт и крутануть вал мотора рукой. При хороших технических показателях электродвигателя лампа обязательно зажжётся.
О производителе
Сегодня такие комнатные парящие цветы предлагают сразу две компании.
- Отечественный бренд Levitera. Он предлагает покупателям не только несколько различных растений на выбор, но и даже пустые цветочные горшки, которые покупатели могут заполнить самостоятельно по своему желанию.
- Шведская компания Flyte. Она также предлагает покупателям различные сорта комнатных растений в левитирующих горшках. Помимо этого, в ассортименте производителя имеются и парящие часы.
Оба производителя выпускают качественную и уникальную продукцию. Разница между их товарами заключается в цене, а также в комплектации, точнее – в разъеме самой вилки-розетки.


Это интересно: Подставки для цветов на подоконник: особенности и виды
Разновидности моделей
Производители сегодня выпускают такие парящие устройства только небольших размеров. Как правило, их диаметр не превышает 10 см. Это объясняется сложностью внутренней конструкции устройства.
Цветовая гамма довольно узкая. В ней представлены лишь 3 цвета: белый, темно-коричневый и светло-бежевый. Опять же, по словам производителей, функции и принцип работы такого горшка являются его главным украшением, поэтому он не нуждается в дополнительном декоре.

В ассортименте есть как просто круглые, так и многогранные модели с небольшим рисунком на поверхности. Однако в целом внешний вид таких приспособлений минимально декорирован. Все специально сделано для того, чтобы именно принцип работы устройства был главной изюминкой.

Диамагнетизм плазмы
В классич. термодинамич. равновесной плазме, согласно теореме Ван Лёвен, магнитный момент равен нулю и Д. отсутствует: диамагнитный момент, создаваемый заряженными частицами, движущимися по замкнутым орбитам, полностью компенсируется благодаря токам, создаваемым за счёт разрыва орбит периферич. частиц при их ударе о стенку камеры, удерживающей плазму. В отсутствие удерживающих стенок Д. плазмы проявляется в условиях космич. плазмы или при магнитном удержании плазмы (напр., в токамаках). Т. о., Д. плазмы связан исключительно с её термодинамич. неравновесностью. Диамагнитный момент плазмы существенно возрастает при наличии магнитной турбулентности.
Моделирование
Теперь можно синтезировать управление. Для исследований был выбран пакет Matlab. Ниже приведён код получения коэффициентов регулятора по состоянию:
g = 9.81; K = 0.659*10^-3; m = 0.0106; L = 0.109; R = 31.1; x10 = 0.005; x20 = 0; x30 = sqrt(g*m/K)*x10; u = R*x30; A = [0 1 0; 2*K*x30^2/(m*x10^3) 0 -2*K*x30/(m*x10^2); -4*K*x20*x30/(L*x10^3) 2*K*x30/(L*x10^2) -R/L+2*K*x20/(L*x10^2)]; B = [0; 0; 1/L]; C = ; W = ctrb(A, B); % Матрица управляемости detW = det(W); poles = ; % Полюса K = acker(A, B, poles); % Регулятор system = ss(A — B*K, B, C, 0); % Сборка модели figure(1) step(system) % тестовое воздействие km = 1/dcgain(system); % масштабирующий коэффициент system_m = ss(A — B*K, B*km, C, 0); figure(2) step(system_m)
Чтобы понять, можно ли синтезировать управление для полученной системы, нужно знать матрицу управляемости, по определителю которой и делается вывод:
>> detW detW = -7.5351e+07
Определитель отличен от нуля, следовательно, линеаризованная система управляема.
Вектор poles
— это вектор, который содержит в себе желаемые полюса линеаризованной системы магнитной левитации.
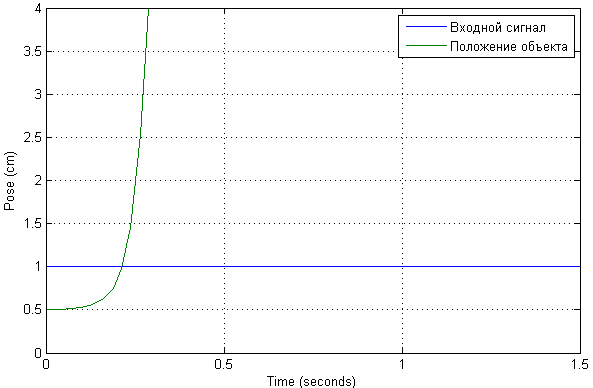
При подаче тестового воздействия в виде единичной ступеньки получаем следующий результат:
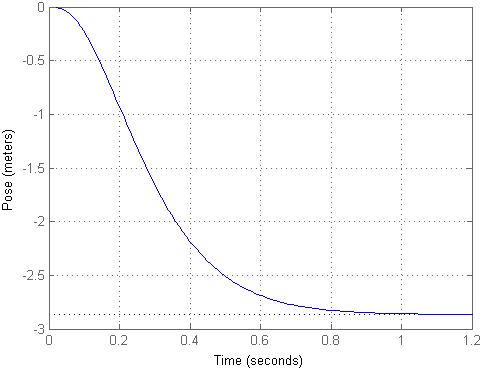
Как видно, получается, что объект улетел на довольно большое расстояние при небольшом воздействии, хотя и остался в одном положении. Чтобы вход соответствовал выходу, можно подсчитать масштабирующий коэффициент km
и домножить на него входной сигнал, что и реализовалось во второй модели. Тогда переходный процесс будет выглядеть следующим образом:
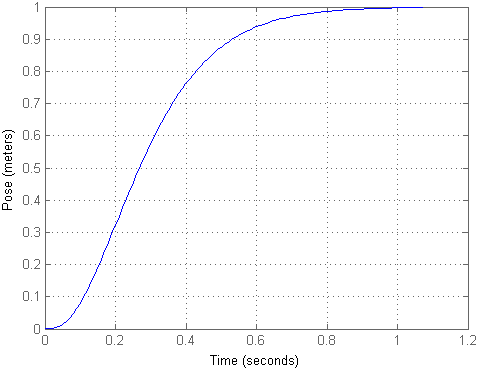
Получающееся положение всё равно велико для подобной установки. Пока оставим без внимания ток и перейдём непосредственно к моделям Simulink, где рассмотрим оставшиеся вещи.
Масштабируем входной сигнал так, чтобы выходные значения было удобно представлять в сантиметрах. Подадим на вход несколько тестовых воздействий, чтобы проверить, как выглядят переходные процессы в системе, а также протекающий ток.
Получается, что величина тока при таких положениях объекта не столь значительна. Сами переходные процессы по положению имеют апериодический характер, без перерегулирования и статической ошибки. Собственно, так и было задано желаемыми полюсами скорректированной системы.
Однако это приближение в рабочей точке может некорректно сработать с исходной нелинейной моделью. Проверим это. Нелинейная модель системы с подключённым регулятором приведена ниже.
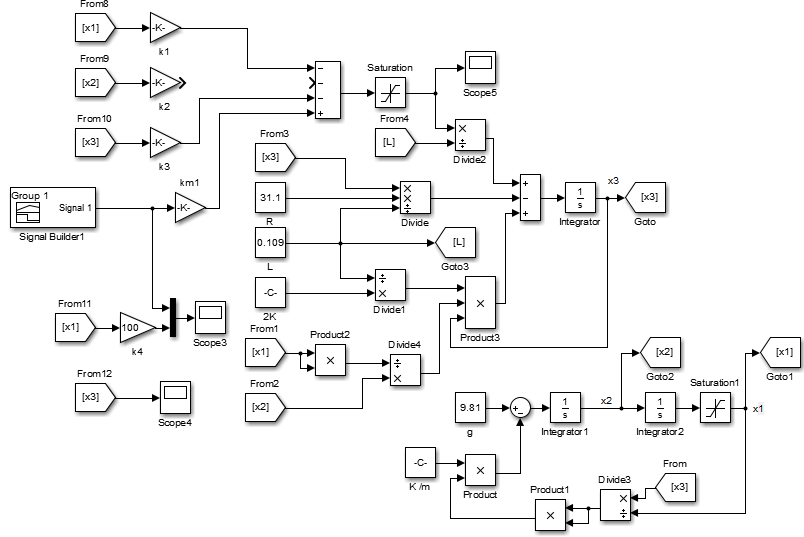
Это уже окончательный вариант, оставленный после всех экспериментов. Были установлены ограничения на входное напряжение (0-12В) и само положение объекта (0-4см). Вторая составляющая регулятора была исключена, поскольку с ней переходный процесс был неустойчив:
После изменений в схеме переходные процессы теперь выглядят так:
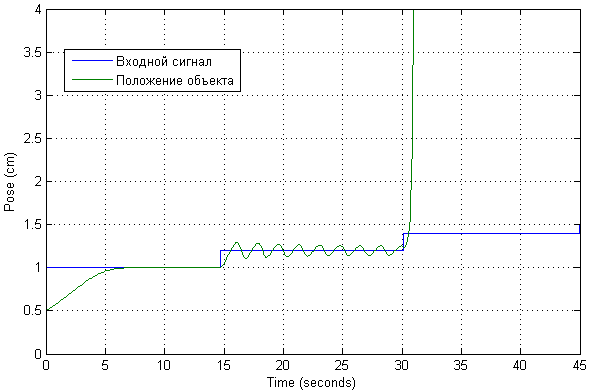
Был сразу проверен возможный диапазон работы такой системы. Можно увидеть, что нужное положение будет достигаться при незначительных отклонениях от начальной точки. При этом возможно проявление существенной колебательности.
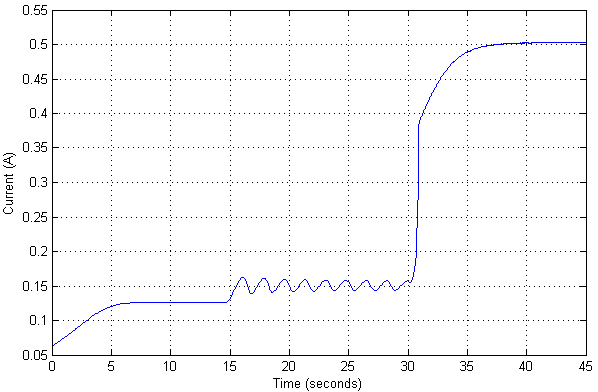
При этом величина тока выглядит следующим образом:
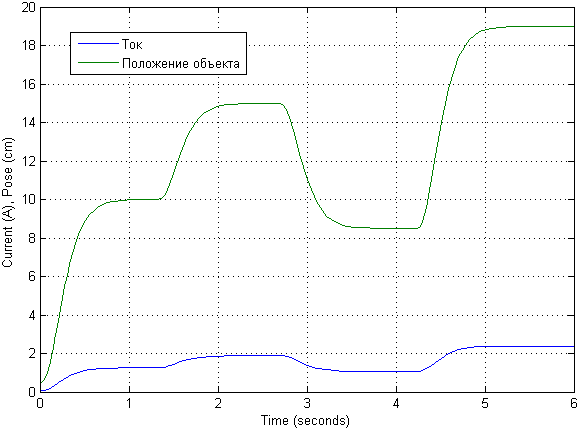
Раз уже была проверка для нелинейной модели объекта, то можно и взглянуть, каким может быть максимальное значения положения для объекта, при котором он ещё не теряет устойчивости.
Проведя моделирование с разными входными сигналами, было замечено, что у линеаризованной модели всё очень даже хорошо. Так что здесь будут продемонстрированы переходные процессы по изначальному входному сигналу, увеличенному в 10 раз.
Сама математическая модель могла бы выглядеть несколько иначе. Её описание взято из описания математической модели.
Шаг 11: Сборка электромагнитов
Соберите электромагниты на акриловый лист, они закреплены в четырех отверстиях вблизи центра. Затяните винты, чтобы избежать движения. Поскольку электромагниты симметричны по центру, они всегда находятся на полюсах напротив, так что провода на внутренней стороне электромагнитов соединены вместе, а провода на внешней стороне электромагнитов подключены к L298N.
Протяните провода под акриловым листом через соседние отверстия, чтобы подключиться к L298N. Медный провод покрыт изолированным слоем, поэтому вы должны удалить его ножом, прежде чем вы сможете припаять их вместе.
Самодельный левитрон в классическом исполнении без датчика
Как видим, благодаря наличию датчика холла удалось изготовить вполне эффектную игрушку. Однако это вовсе не означает, что без датчика не обходится. Напротив, самодельный левитрон в классическом исполнении, это лишь большой магнит от динамика (диаметром 13-15 см) и маленький кольцевой магнит для волчка (2-3 см в диаметре), без использования датчика.
Ось волчка делается, как правило, из старой ручки или карандаша. Главное – стержень подбирается так, чтобы плотно заходил по центру кольцевого магнита. Лишняя часть ручки после этого срезается (примерно 10 см в длину вместе с закрепленным магнитом для волчка, то что надо).
Классическая схема изготовления левитрона подразумевает также наличие десятка различных шайб, вырезанных из плотной бумаги. Для чего они понадобятся? Если в вышеописанном случае тоже использовалась бумага, и как мы помним – для смещения центра тяжести вниз или проще, для настройки. То же самое и здесь. Шайбочки буду нужны для идеальной настройки волчка (при необходимости сажаются после кольцевого магнита на стержень).

Вырезание шайб из бумаги

Левитация волчка над большим магнитом
Но и это еще не все. Как в первом случае (с использованием датчика холла), так и во втором, надо добиться идеальной ровности источника притяжения. Говоря иначе, поставить большой магнит на идеально ровную поверхность. Чтобы добиться этого, применяются деревянные подставки различной толщины. Если магнит сидит не ровно, подставки ставятся с одной стороны или с нескольких, таким образом, настраивается ровность.
Высокотемпературные сверхпроводники
В природе мало чистых сверхпроводников. Большинство их материалов, обладающих свойствами сверхпроводимости, являются сплавами, у которых чаще всего наблюдается лишь частичный эффект Мейснера.
В сверхпроводниках именно способность полностью вытеснять магнитное поле из своего объема разделяет материалы на сверхпроводники первого и второго типов. Сверхпроводниками первого типа являются чистые вещества, например, ртуть, свинец и олово, способные даже при высоких магнитных полях продемонстрировать полный эффект Мейснера. Сверхпроводники второго типа – чаще всего сплавы, а также керамика или некоторые органические соединения, которые в условиях магнитного поля с высокой индукцией способны лишь на частичное вытеснение магнитного поля из своего объема. Тем не менее в условиях очень малой индукции магнитного поля практически все сверхпроводники, в том числе и второго типа, способны на полный эффект Мейснера.
Известно несколько сотен сплавов, соединений и несколько чистых материалов, обладающих характеристиками квантовой сверхпроводимости.
Левитирующая лампочка Flyte
Ранее на рынке уже появлялся подобный продукт, но это была обычная подставка с вертикально расположенной лампочкой над ней. Данное изделие получило название Flyte.
Честно сказать, выглядело все это дело хоть и необычно, но не совсем практично.
Единственное преимущество левитирующей лампы Flyte заключалось в многофункциональности ее подставки.
От нее можно было заряжать смартфоны поддерживающие беспроводную зарядку.
Вы как бы получали два устройства в одном.
Теперь же инженеры разработали полноценный настольный светильник, в котором лампочка действительно висит в воздухе вниз головой.
При этом не касаясь корпуса или плафона никакой своей частью.
Как сделать левитрон своими руками
Что такое левитрон?
Левитрон — это игрушка, демонстрирующая левитацию крутящегося волчка, в котором расположен неодимовый магнит над ферритовым магнитом большего деаметра. Выглядит это удивительно!
Материалы для изготовления Левитрона
Итак, нам понадобится для изготовления игрушки три магнита в форме колец, обладающие достаточной мощностью. Вполне подойдут для нашей цели магниты из низкочастотных динамиков, срок службы которых давно истек. Для того чтобы сделать волчок, будет нужен неодимный магнит. Взять его можно из динамика, на котором имеется надпись«Neodium transducer». Применяются подобные динамики в сотовых. Самый сильный постоянный магнит сегодня – это неодимный, созданный из сплава, в который входят неодим, бор и железо. Высокая температура негативно повлияет на него, поэтому этот магнит следует беречь от нагревания. Итак, магнит из сотового телефона может оказаться двух видов – в виде круглой пластинки или же в виде кольца. Кольцевой магнит одевается на сам волчок строго по центру, а магнит в форме таблетки приклеивается на ось волчка снизу. Материалом для самого волчка должен служить легкий материал, такой как композит или пластмасса.
Настройка левитрона
К настройке следует подойти с особой скрупулезностью, ведь эта часть работы имеет решающее значение и является наиболее трудоемкой. Кольцевые магниты должны быть соединены между собой разнополярными сторонами. Сверху на них следует установить пластину (не из металла) толщиной до 1 см. Волчок аккуратно будет установлен в основание левитрона – центр магнита. Если Вы заметили, что волчок отклоняется в сторону, значит, магнит нужно заменить на другой, с большим диаметром. Чтобы запустить волчок, понадобятся еще несколько элементов, с помощью которых можно будет регулировать толщину платформы, чтобы достичь нормального вращения волчка. Нам понадобится пластика из оргстекла с бумажными листами. Если волчок крутится нормально, начинаем плавно приподнимать платформу, пока он не взлетит вверх.
Если наш волчок подлетает с излишней стремительностью, следует увеличить его вес. Если же он отклоняется в одну сторону, то исправить ситуацию можно, подложив бумажные листы под противоположную. Эти действия позволяют настроить основу нашей игрушки, так чтобы она находилась четко на уровне моря.
И видео с левитронами…
Видео доступно толькоавторизованным пользователям
Левитирующий цветок. Преимущества
- Улучшает внешний вид растений;
- Необычный дизайн;
- Помогает бороться с негативной энергетикой;
- Избавляет от головной боли и успокаивает нервную систему;
- Прост в использовании;
- Подходит для любых комнатных растений с небольшой корневой системой.
Растение, парящее в воздухе, станет необычным декором любого помещения
Зеленые и цветущие обитатели подоконников будут обогащать вашу комнату кислородом за ваше внимание к ним. Купите летающий горшок для цветов, и самый простой кактус будет выглядеть оригинально и необычно
Парящие растения уже успели полюбиться многими коллекционерами необычных цветов.
Характеристики
- Материал: пластик;
- Мощность: 5-10 W;
- Напряжение: 12 V;
- Размер горшка: 8,5 х 8,5 х 3,5 см;
- Размер основы: 13,6 х 13,6 х 2,3 см.
Что такое левитрон
ВНИМАНИЕ!
Найден совершенно простой способ сократить расход топлива! Не верите? Автомеханик с 15-летним стажем тоже не верил, пока не попробовал. А теперь он экономит на бензине 35 000 рублей в год!. Левитрон – это игрушка
Ее нет никакого смысла покупать, если знать варианты изготовления самодельного устройства. Ничего сложного в конструкции такого левитрона не будет, если имеется обычный датчик холла, например, купленный для автомобильного трамблера, и оставленный впрок
Левитрон – это игрушка. Ее нет никакого смысла покупать, если знать варианты изготовления самодельного устройства. Ничего сложного в конструкции такого левитрона не будет, если имеется обычный датчик холла, например, купленный для автомобильного трамблера, и оставленный впрок.
Следует знать, что эффект левитации наблюдается всегда в достаточно узкой зоне. Такие реалии несколько ограничивают свободу действий умельцев, однако при приложении терпения и времени, можно всегда настроить левитрон качественно и эффективно. Он практически не будет падать или скакать.
Шаг 2: ПИД-регулятор (PID)
Из Википедии: «Пропорционально-интегрально-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.»
В простом понимании: «ПИД-регулятор вычисляет значение «ошибки» как разность между измеренным и желаемой установкой. Контроллер пытается свести к минимуму ошибку, отрегулировав ».
Итак, вы указываете PID, что измерить (Вход), какое значение вы хотите и переменную, которая поможет иметь это значение на выходе. Далее ПИД-регулятор настраивает выходной сигнал, чтобы сделать вход равным установке.
Для примера
: в автомобиле у нас три значения (Вход, Установка, выход) будут — скорость, желаемая скорость и угол педали газа, соответственно.
В данном проекте:
- Вход представляет собой текущее значение в реальном времени от датчика холла, которое обновляется непрерывно, поскольку положение плавающего магнита будет меняться в реальном времени.
- Заданное значение — это значение от датчика холла, которое измеряется, когда плавающий магнит находится в положении баланса, в центре основания магнитов. Этот индекс фиксирован и со временем не изменяется.
- Выходной сигнал — скорость для управления электромагнитами.
Стоит поблагодарить сообщество любителей Arduino, которое написало PID-библиотеку и которая очень проста в использовании. Дополнительная информация об Arduino PID есть на официальном сайте Arduino . Нам нужно использовать пару ПИД-регуляторов под Arduino, один для оси X и другой для оси Y.
Мистическая угроза Петербургу
Тайны человечества
Противоречив и причудлив путь всемирной истории, обеспечивающий поступательное развитие человечества от архаического прошлого к новейшим временам. Зарождаются цивилизации или гибнут континенты, …
Кредит без справки о доходах
Современные банки предлагают такое огромное количество кредитных предложений, что ни один заемщик не может оказаться в стороне. Взять сегодня…
Пять правильных привычек питания
Любой человек, который только становится на путь правильного питания, теряется от огромного количества информации. Безусловно, соотношение белков, жиров и углеводов играет важнейшую роль…
Российские истребители Су — 27
Су-27 — один из самых известных боевых самолётов в мире. Су-27 — шедевр отечественного авиастроения. В ноябре НАТО заявило, что…
Скорость НЛО
Неопознанные летающие объекты бесспорно представляют собой целый комплекс загадок, одной из которых является скорость НЛО. Существуют документы, подтверждающие зафиксированные приборами…
Доступные способы преображения интерьера
Философия комфорта подталкивает обывателя к поискам оригинальных решений в обустройстве жилища. Любая интерьерная стилистика, по истечению определенного промежутка времени, потеряет свежесть…
Мы в шоке. Летает само и не падает.
Окей, ладно, на самом деле всё в порядке. Просто в офис приехал LePlant
: , которое ты выращиваешь сам.
Между прочим, секунда гордости: сделано в России.??
Мне кажется, плошка LePlant должна быть в каждом офисе нового кампуса Apple. Как раз в тему: летающая тарелка, летающие растения. Получается смесь футуристичного с природой, о которой лет 10 назад никто бы не додумался.
И вообще. Представьте себе, если сегодня могут левитировать растения – что будет завтра? ?
Левитрон самодельный
Левитрон позволяет осуществлять магнитную подвеску объектов с небольшим весом путем управления магнитным полем, создаваемым катушкой L1. Обратная связь происходит с помощью датчика Холла, выпаянного со старого 3,5″ дисковода (от дискет). Под воздействием внешнего магнитного поля на клеммах H+ и H- возникает разность потенциалов в зависимости от направления поля и его положения.
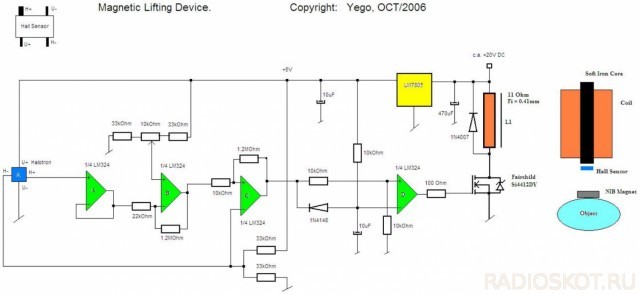
Датчики Холла такого типа довольно низкого качества, но их вполне достаточно для этого применения. Некоторые используют дорогие ратиометрические датчики, но они дороги и довольно труднодоступны.
Датчик, который использован тут, является линейным устройством, но его легко спутать с цифровыми, что также часто стоят на дисководах.
Чтобы избежать ошибки, проверьте его с помощью обычного мультиметра или осциллографа.

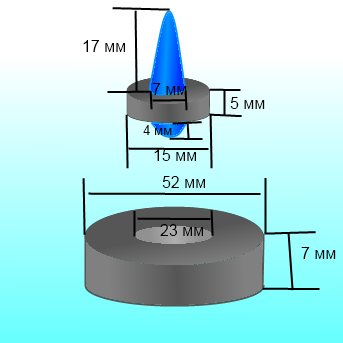
Катушка левитрона представляет собой спиральную проволоку диаметром 0,4 мм на сердечнике — винт с поперечным сечением около 1 см кв. и длиной около 5 см. Под ним установлен датчик.
Хорошей идеей является защита его пластиком, который не был бы поврежден неодимовым магнитом, если его случайно ударить об сердечник катушки. Объект, подвешенный под катушкой, должен быть снабжен неодимовым магнитом.
Например цилиндрический магнит с поперечным сечением 15 мм и длиной 20 мм.
Для правильной работы устройства полярность катушки и магнита должны быть выбраны соответствующим образом. Это легко сделать с помощью простого компаса. Магнит должен быть направлен к Земле полюсом «S». Приведенная в действие катушка также должна смотреть на Землю с южным полюсом. Таким образом, катушка будет тянуть магнит, когда он находится в пределах своего магнитного поля.
Схема также содержит элементы, защищающие катушку и полевой транзистор от сгорания, когда объект прилипает к сердечнику или выпадает из поля. В этом случае схема управления катушкой закрыта, и ток там не течет. Итого:
- катушка точно и симметрично намотана,
- датчик расположен точно в центре сердечника,
- почти весь вес шара находится намного ниже магнита,
- катушка ориентирована точно вертикально.
Графики сигналов в контрольных точках

- Uh+: напряжение на положительном выходе галлотрона,
- Ua: напряжение на выходе повторителя A,
- Ub: напряжение на выходе инвертирующего усилителя B,
- Uc: напряжение на выходе триггера Шмидта C,
- Ud: напряжение, управляемое полевым транзистором.
Что касается потребления тока, измерения цифровым мультиметром показали значение ниже 100 мА (рост при увеличении веса). Чтобы увеличить грузоподъемность, катушки также должны быть увеличены, как и поперечное сечение сердечника и / или его магнитная проницаемость. Можно попытаться использовать ферритовое, но такие сердечники имеют значение частот выше 100 кГц.

Транзистор имеет постоянный ток 7 А и сопротивление канала 30 мОм. В результате он вообще не нагревается. Однако вы можете поднять напряжение, управляющее затвором транзистора, чтобы уменьшить это сопротивление, что, в свою очередь, уменьшит потери тепла в транзисторе.
На самом деле, расстояние от левитирующего объекта зависит от силы электромагнита. Это означает, что чем больше произведение тока катушки и количества витков катушек, тем больше напряженность магнитного поля, создаваемого катушкой.
Но это еще не все. Кроме того, на расстояние также влияет проницаемость и площадь поперечного сечения сердечника, чувствительность и динамический диапазон датчика Холла, размер неодимового магнит (интенсивность магнитного поля).
Форум по устройствам магнитной левитации
Обсудить статью Левитрон самодельный
Шаг 12: Сенсорный модуль и магниты
Используйте горячий клей для фиксации модуля датчика между электромагнитами, обратите внимание, что каждый датчик должен быть квадратным с двумя электромагнитами, один на передней и другой на задней панели. Попробуйте выполнить калибровку двух датчиков как можно более централизованно, чтобы они не перекрывались, что сделает датчик наиболее эффективным. Следующий шаг — собрать магниты на акриловой основе
Объединяя два магнита D15*4 мм и магнит D15*3 мм вместе, чтобы сформировать цилиндр, это приведет к тому, что магниты и электромагниты будут иметь одинаковую высоту
Следующий шаг — собрать магниты на акриловой основе. Объединяя два магнита D15*4 мм и магнит D15*3 мм вместе, чтобы сформировать цилиндр, это приведет к тому, что магниты и электромагниты будут иметь одинаковую высоту
Соберите магниты между парами электромагнитов, обратите внимание, что полюса восходящих магнитов должны быть одинаковыми
Похожие записи:
 Как подсушить хлеб в микроволновой печи: делаем сухарики в свч
Как подсушить хлеб в микроволновой печи: делаем сухарики в свч
 Как сделать козла строительные видео. козлы строительные своими руками: изготовление и рекомендации
Как сделать козла строительные видео. козлы строительные своими руками: изготовление и рекомендации
 Как вкусно пожарить сельдь свежемороженую
Как вкусно пожарить сельдь свежемороженую
 Делаем вечный календарь «мишка с лавандовым букетом»
Делаем вечный календарь «мишка с лавандовым букетом»
 Как проверить якорь болгарки мультиметром
Как проверить якорь болгарки мультиметром
 Рейтинг прикормочных корабликов. топ 5 недорогих моделей
Рейтинг прикормочных корабликов. топ 5 недорогих моделей