Содержание
Cпособы регулирования скорости вращения асинхронного двигателя

Асинхронные двигатели переменного тока являются самыми применяемыми электродвигателями абсолютно во всех хозяйственных сферах. В их преимуществах отмечается конструктивная простота и небольшая цена
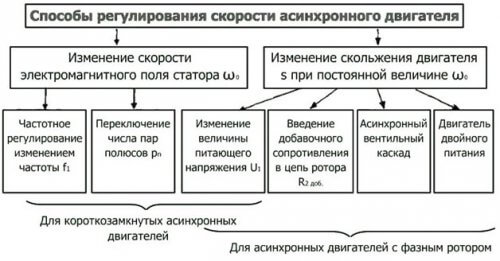
При этом немаловажное значение имеет регулирование скорости асинхронного двигателя. Существующие способы показаны ниже
Согласно структурной схеме скоростью электродвигателя можно управлять в двух направлениях, то есть изменением величин:
- скорость электромагнитного поля статора;
- скольжение двигателя.
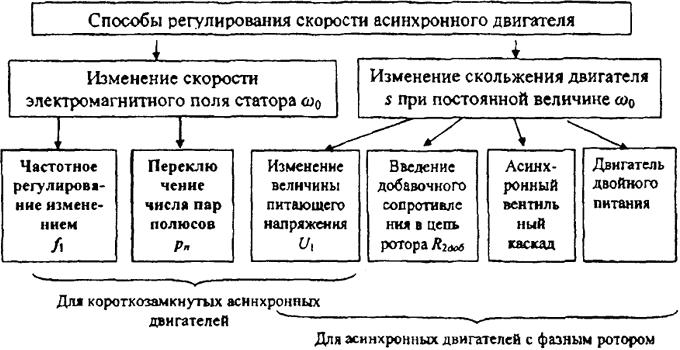
Первый вариант коррекции, используемый для моделей с короткозамкнутым ротором, осуществляется за счет изменения:
- частоты,
- количества полюсных пар,
- напряжения.
В основе второго варианта, применяемого для модификации с фазным ротором, лежат:
- изменение напряжения питания;
- присоединение элемента сопротивления в цепь ротора;
- использование вентильного каскада;
- применение двойного питания.
Вследствие развития силовой преобразовательной техники на текущий момент в широком масштабе изготовляются всевозможные виды частотников, что определило активное применение частотно-регулируемого привода. Рассмотрим наиболее распространённые методы.
Регулятор асинхронного двигателя
Всем здравствуйте. В сети, да и в общем часто возникает вопрос, как выполнить регулятор скорости вращения вентилятора для асинхронного двигателя? Известно, что мы можем легко регулировать скорость двигателя, используя симистор с фазовым управлением. И также, в литературе содержится информация о том, что асинхронный двигатель вращается со скоростью от нескольких процентов до 20% ниже, чем синхронная скорость. Поэтому на вопрос о регулировании вращения асинхронного двигателя назревает ответ, инвертор. Однако это устройство является достаточно дорогостоящим, и смысл его выполнять собственными силами является спорным. Также считается, что использование фазового регулятора мощности с использованием симистора для этой цели невозможно. Однако это убеждение не совсем верно. Для некоторых двигателей и нагрузок использование симистора с фазовым управлением позволяет регулировать обороты в широком диапазоне.
Доступны интегральные микросхемы в таких простых фазовых регуляторах
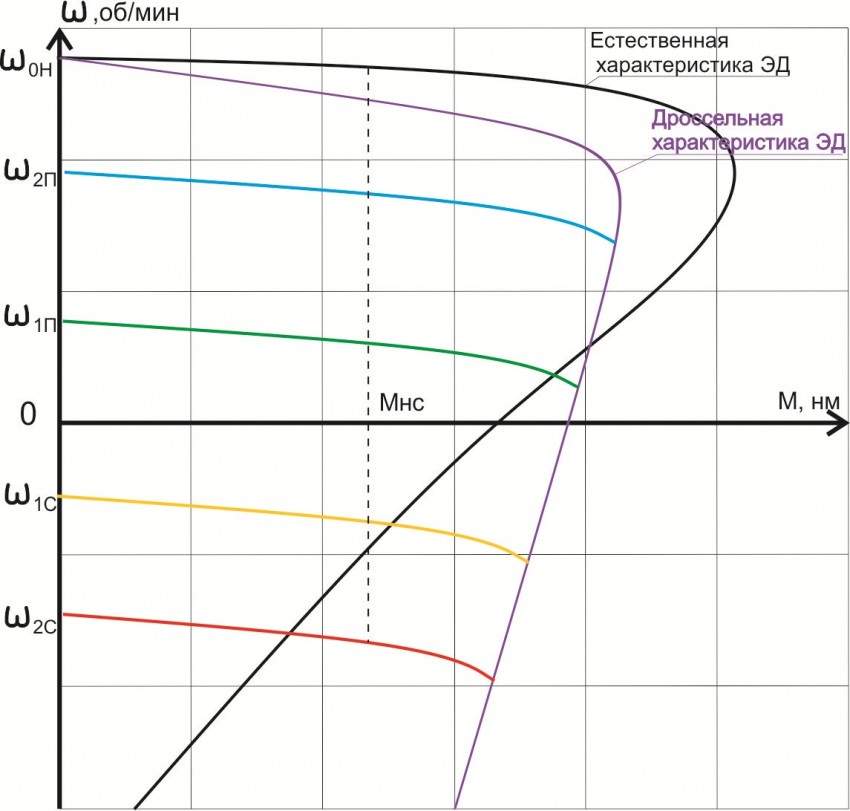
Принимая во внимание ограничения, налагаемые системой фазового регулятора, мы можем очень просто создать нормально работающий регулятор скорости асинхронного двигателя. Давайте попробуем рассмотреть, что происходит после подключения асинхронного двигателя к типовому димеру, который обычно выполнен в соответствии с схемой, приведенной на рисунке
Рассмотрим случай (рисунок графика), когда симистор включается под углом = 100 после того, как напряжение сети проходит через ноль. Угол проводимости будет около 150 градусов, поэтому симистор отключится под углом около 250 градусов в точке B. Остаточное положительное напряжение останется на конденсаторе C1, поскольку он не полностью разряжается через симистор.
В этот момент в системе запуска появляется отрицательное напряжение, которое сначала заряжает остаточное напряжение до С1, а затем запускает триод под углом около 350. Второе включение симистора произойдет при очень низком напряжении, и угол проводимости будет намного меньше, чем при первом. В следующем периоде условия аналогичны, поэтому значительная асимметрия активации симистора в отрицательном и положительном полупериодах сохраняется. Такая асимметрия недопустима в схеме управления двигателем, она может быть даже опасна из-за насыщения магнитной системы.
Четыре стандартных диода, два резистора и потенциометр были добавлены в стандартную схему димера, которая показана на рисунке.
В первом полупериоде система ведет себя так же, как схема из предыдущего рисунка. Однако после появления отрицательного напряжения остаточное положительное напряжение на С1 разряжается через диод D4 и резистор R2. Диод D3 предотвращает дальнейшую зарядку с отрицательным напряжением C1, даже после того, как положительное напряжение было разряжено. Элементы D1, D2 и R1 выполняют аналогичную функцию в положительном полупериоде. В результате работы схемы симметризации после нескольких периодов асимметрия устраняется.
Элементы R5 и C2 сглаживают выбросы напряжения, возникающие после отключения симистора в точке B. Без них быстрое увеличение напряжения на выходе может привести к включению симистора. Резистор R4 увеличивает время запускающего импульса. Без него это время будет определяться емкостью С1 и внутренними сопротивлениями элементов С1, Т1 и Т2 и будет слишком коротким, чтобы правильно запустить симистор.
Ток на индуктивной нагрузке после включения симистора медленно увеличивается, при слишком коротком импульсе он может не достигнуть значения IL «защелкивающегося» тока, и симистор отключится после импульса затвора. IL для типовых симисторов составляет от нескольких до нескольких десятков миллиампер.
Схема может быть собрана на печатной плате, показанной на рисунке в тексте.
Стоить обратить внимание на тот факт, что во время работы присутствует полное напряжение сети. Так что не переусердствуйте с миниатюризацией устройства
Не исключено, что регулятор будет работать в условиях повышенной влажности и, возможно, даже химически агрессивных. Поэтому расстояние между дорожками должно быть на значительном расстоянии, что влечет за собой размер платы.
Способы изменения оборотов двигателя
Регулировка оборотов любого трехфазного электродвигателя, используемого в подъемно-транспортной технике и оборудовании, позволяет добиться требуемых режимов работы точно и плавно, что далеко не всегда возможно, например, за счет механических редукторов. На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
- Изменение скорости магнитного поля в статоре. Достигается за счет частотного регулирования, переключения числа полюсных пар или коррекции напряжения. Следует добавить, что эти методы применимы для электродвигателей с короткозамкнутым ротором,
- Изменение величины скольжения. Этот параметр можно откорректировать за счет питающего напряжения, подключения дополнительного сопротивления в электрическую цепь ротора, применения вентильного каскада или двойного питания. Используется для моделей с фазным ротором.
Наиболее востребованными методами являются регулирование напряжения и частоты (за счет применения преобразователей), а также изменение количества полюсных пар (реализуется путем организации дополнительной обмотки с возможностью переключения).
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор — это часть вращения, статор — это внешний по типу магнит.
- Щётки, которые произведены из графита — это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор —это устройство, которое производит слежку за характеристикой вращения прибора. Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
- Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов. Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Схема регулятора оборотов коллекторного двигателя
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
https://youtube.com/watch?v=EYkb8_6F-Sw
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
- Для существенной экономии электроэнергии. Так, не любому механизму нужно много энергии для выполнения работы вращения мотора, в некоторых случаях можно уменьшить вращение на 20−30 процентов, что поможет значительно сократить расходы на электроэнергию сразу в несколько раз.
- Для защиты всех механизмов, а также электронных типов цепей. При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.
- Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.
- Для снижения уровня расходов на обслуживание устройств. С помощью таких регуляторов оборотов в двигателях 220 В можно значительно уменьшить возможность выхода из строя приборов, а также отдельных типов механизмов.
Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств. Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2

Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
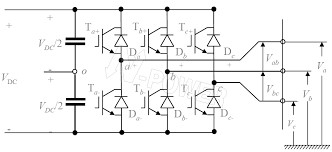
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
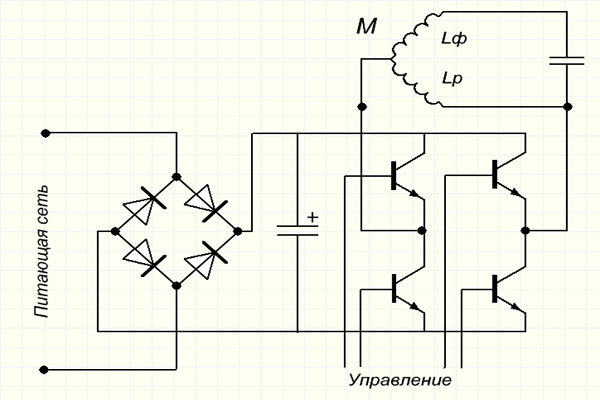
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
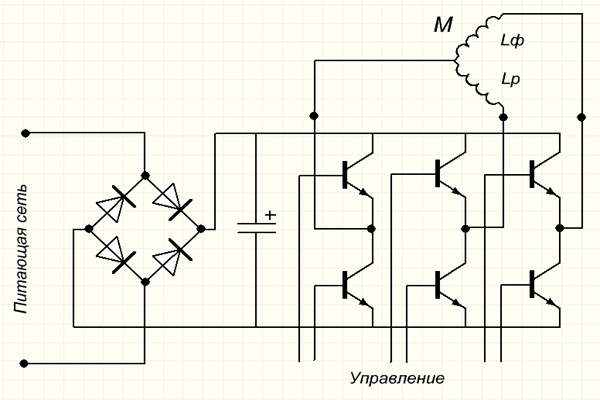
Использование ЧП для трёхфазных двигателей

Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
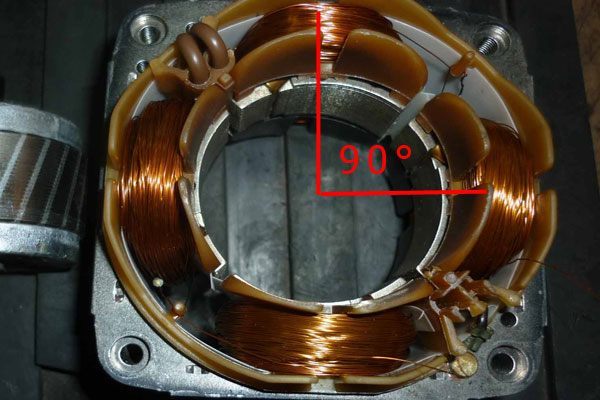
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Принцип работы
Для сборки лучше всего выбрать тиристорный преобразователь, он позволит осуществлять изменение режима работы без существенных потерь.
К тому же, благодаря нему будут настроены такие функции как:
- Разгон-торможение.
- Жесткое регулирование характеристик.
- Переключение на реверсивное движение.
К тому же у него импульсно-фазовое управление. Которое, позволяет не терять момент вращения ротора, не увеличивая потери на реактивной характеристике.
Схема регулятора оборотов будет состоять из следующих ключевых узлов:
- Управляемый выпрямитель сигнала.
- Блок регулирования.
- Система обратной связи.
- Регулятор мощности сети.

Выбираем устройство
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате
А лучше превышать для безопасной работы системы.
Напряжение должно быть в допустимых широких диапазонах.
Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
Прибор триак
Устройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Устройство коллекторного электродвигателя стиральной машины-автомата
Внешний вид моторов разных моделей может отличаться, но устройство, принцип работы практически идентичны. Прибор состоит из:
- корпуса;
- стартера;
- катушек стартера (башмаков) с двумя или тремя выводами;
- якоря;
- шкива;
- двух щёток;
- коллектора;
- таходатчика (с двумя или тремя проводами);
- клеммной колодки.
Чтобы подключить двигатель, нужно знать выходы обмоток якоря, стартера и таходатчика. Не запутаться в проводах поможет тестер.
Простое подключение электродвигателя
Установите тестер в режим наименьшего сопротивления и обзвоните обмотки таходатчика, катушек и якоря. Проводите подключение по клеммам, которые прозваниваются между собой. Правильно подключённый прибор набирает скорость плавно, не трещит и не искрится. Проверить, сколько оборотов делает мотор, можно датчиком оборотов.
Наглядное пошаговое включение можно посмотреть в этом видео:
Это удовлетворительный вариант для насоса или вентилятора. Для более мощных механизмов (например, станков) понадобится иная схема регулятора.
Суть вопроса — как уменьшить обороты, не потеряв работоспособность? Подключение производится через тахогенератор, который передаёт количество витков микросхеме регулятора оборотов, координирующей цикл с помощью тиристора.
Структура частотного регулятора
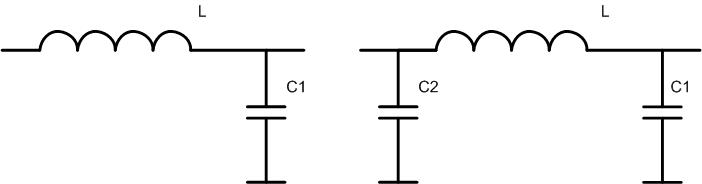
Большинство частотных преобразователей для электродвигателей до 690 В выполнены по схеме двухуровневых инверторов напряжения. Они позволяют моделировать напряжение питания необходимой формы, амплитуды частоты. Такие устройства состоят из неуправляемого выпрямителя, 2-х транзисторных ключей на каждую фазу и конденсатора. Выходное напряжение содержит высшие гармоники, которые сглаживаются индуктивной нагрузкой. Специальные фильтры применяют относительно редко.
К недостаткам такой схемы является ограничение величины выходного напряжения, которое определяется максимальным напряжением полупроводниковых устройств.
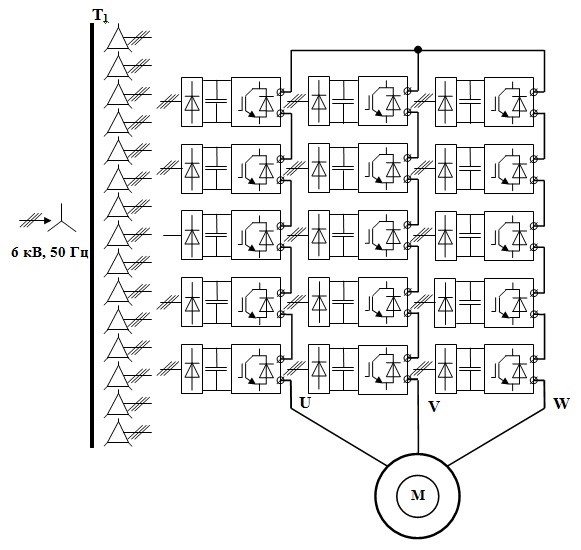
Для высоковольтных приводов используются многоуровневые схемы регулирования. Они состоят из нескольких однофазных инверторов, соединенных последовательно. Такая схема позволяет избежать резонансов, обеспечивает высокое быстродействие, снижает скорость нарастания напряжения. Такие ПЧ имеют модульную конструкцию. При выходе из строя одной из ячеек, ее легко заменить. К недостаткам этой схемы относятся необходимость отдельного источника питания для каждого модуля, функции которого выполняет трансформатор специального назначения.
Преобразователи частоты с плавающими конденсаторами позволяют обойтись без входного трансформатора и увеличивать число ячеек в зависимости от требуемой мощности. Такое решение обеспечивает снижение высших гармоник, уменьшает скорость нарастания напряжения.
Для регулировки скорости электродвигателей с повторно-кратковременным режимом работы частыми реверсами применяют инверторы тока. Эти устройства представляют собой управляемый выпрямитель и инвертор на тиристорах. Для уменьшения помех в цепи нагрузки в схему включается расщепленный индуктивный фильтр. Выходное напряжение таких устройств имеет форму аппроксимированной синусоиды. Для сглаживания его формы обязательно включение перед электродвигателем конденсаторов. Главное достоинство таких ПЧ – возможность рекуперации электроэнергии обратно в электросеть.
Прямые преобразователи частоты не содержат конденсаторов. Главное их преимущество – небольшие габариты и значительная мощность нагрузки. Такие устройства используются в составе мощных электроприводов работающих на низких скоростях. ПЧ этого типа выполнены на базе тиристорных преобразователей. На входе прямых ПЧ установлен фазосдвигающий трансформатор, устраняющий низшие гармоники и выполняющий функцию источника питания для каждого преобразователя. Прямые ПЧ требуют сложной схемы управления.
Регулирование частоты вращения ДПТ НВ изменение напряжения в цепи якоря
Регулирование частоты вращения двигателя изменением питающего напряжения применяется лишь при IB = const, т. е. при раздельном питании цепей обмотки якоря и обмотки возбуждения при независимом возбуждении.
Частота вращения в режиме х.х. n пропорциональна напряжению, а от напряжения не зависит, поэтому механические характеристики двигателя при изменении напряжения не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (см. рис. 29.4, в
). Для осуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым напряжением. Для управления двигателями малой и средней мощности в качестве такого источника можно применить регулируемый выпрямитель, в котором напряжение постоянного тока меняется регулировочным автотрансформатором (АТ), включенным на входе выпрямителя (рис. 29.6,а).
Для управления двигателями большой мощности целесообразно применять генератор постоянного тока независимого возбуждения; привод осуществляется посредством приводного двигателя (ПД), в качестве которого обычно используют трехфазный двигатель переменного тока. Для питания постоянным током цепей возбуждения генератора Г
и двигателяД используется возбудительВ — генератор постоянного тока, напряжение на выходе которого поддерживается неизменным. Описанная схема управления двигателем постоянного тока (рис. 29.6,б )известна под названием системы «генератор — двигатель»(Г—Д) .
Советуем изучить — Обслуживание и ремонт магнитных пускателей (стр. 1 из 3)
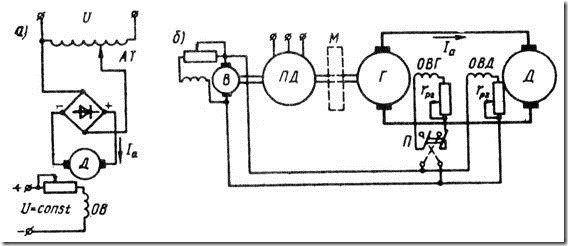
Рис. 29.6. Схемы включения двигателей постоянного тока при регулировании частоты вращения изменением напряжения в цепи якоря
Изменение напряжения в цепи якоря позволяет регулировать частоту вращения двигателя вниз от номинальной, так как напряжение свыше номинального недопустимо. При необходимости регулировать частоту вращения вверх от номинальной можно воспользоваться изменением тока возбуждения двигателя.
Изменение направления вращения (реверс) двигателя, работающего по системе Г
—Д, осуществляется изменением направления тока в цепи возбуждения генератораГ переключателемП, т. е. переменой полярности напряжения на его зажимах. Если двигатель постоянного тока работает в условиях резко переменной нагрузки, то для смягчения колебаний мощности, потребляемой ПД из трехфазной сети, на вал ПД помещают маховикМ, который запасает энергию в период уменьшения нагрузки на двигательД и отдает ее в период интенсивной нагрузки двигателя.
Регулирование частоты вращения изменением напряжения в цепи якоря обеспечивает плавное экономичное регулирование в широком диапазоне nMAX/nMIN ≥ 25 . Наибольшая частота вращения здесь ограничивается условиями коммутации, а наименьшая — условиями охлаждения двигателя.
Еще одним достоинством рассматриваемого способа регулирования является то, что он допускает безреостатный пуск двигателя при пониженном напряжении.
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина – не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие – массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование – основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей – INVERTEK DRIVES.
Это модель Optidrive E2

Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f – частота тока
С – ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
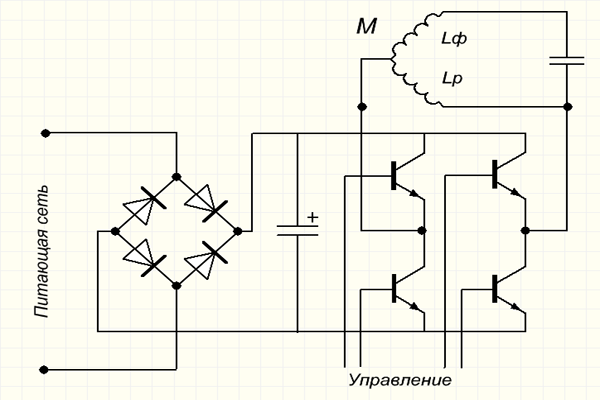
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя – в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
Спасибо за явные советы
- Поделиться этим сообщением через
- Digg
- Del.icio.us
- Technorati
- Разместить в ВКонтакте
- Разместить в Facebook
- Разместить в MySpace
- Разместить в Twitter
- Разместить в ЖЖ
- Разместить в Google
- Разместить в Yahoo
- Разместить в Яндекс.Закладках
- Разместить в Ссылки@Mail.Ru
- Reddit!
По деталям стоимость 3-5 евро в рубли переводите сами. Но эта схема вам не подойдёт можете сразу о ней забыть.. Подобные тирристорные регуляторы работают неплохо на активную нагрузку. Допустим для регулировки освещения на лампе накаливания, или скажем регулятор температуры паяльника и т.д. Если подключите регулятор к индуктивной нагрузке , эл двигатель как раз кней относится, тирристор откроется практически полностью. Это равносильно что вы подали на эл. двигатель напряжение через диод со всеми вытекающими.. По вашему вопросу либо делайте понижающий редуктор, либо меняйте эл.двигатель . По приведённому вами тексту: Все вышеперечисленные эл. двигатели от дрелей, шлифмашинок и т.д. так называемые коллекторные эл. двигатели. Они однофазные в них имеется так называемый «фазный» ротор с намотанными на нём обмотками, питание этот ротор получает от коллектора через щёточный механизм. Т.е. по сути эти эл. двигатели устроены как и эл. двигатели постоянного тока, некоторые такие эл . двигатели даже работают как на постоянном так и на переменном токе. Для них схема регулировки может и подойти. Но у вас двигатель 3х фазный с так называемым «короткозамкнутым ротором» это совсем другая «опера». Регулировка оборотов таких двигателей выполняется либо изменением числа пар полюсов обмотки стартера. Т.е. без перемотки двигателя не обойтись. Либо с применением преобразователя частоты.
как правильно рассчитать диаметры шкивов, чтобы ножевой вал деревообрабатывающего станка вращался со скоростью 3000…3500 оборотов в минуту. Частота вращения электрического двигателя 1410 оборотов в минуту (двигатель трехфазный, но будет включен в однофазную сеть (220 В) с помощью системы конденсаторов. Ремень клиновой.
Диаметр шкива, в зависимости от частоты вращения вала и линейной скорости шкива, определяют по формуле:
где D1 — диаметр шкива, мм; V — линейная скорость шкива, м/с; n — частота вращения вала, об/мин.
Легко подсчитать, что для шкива на валу электродвигателя с частотой вращения 1400 об/мин, минимальный диаметр шкива (повышающая передача) при линейной скорости ремня 10 м/с составит около 136 мм.
Диаметр ведомого шкива вычисляют по следующей формуле:
D2 = D1x(1 — ε)/(n1/n2),
где D1 и D2 — диаметры ведущего и ведомого шкивов, мм; ε — коэффициент скольжения ремня, равный 0,007…0,02; n1 и n2 — частота вращения ведущего и ведомого валов, об/мин.
Так как значение коэффициента скольжения весьма мало, то поправку на скольжение можно и не учитывать, то есть вышестоящая формула приобретет более простой вид:
Минимальное расстояние между осями шкивов (минимальное межцентровое расстояние) составляет:
где Lmin — минимальное межцентровое расстояние, мм; D1 и D2 — диаметры шкивов, мм; h — высота профиля ремня.
Чем меньше межцентровое расстояние, тем сильнее изгибается ремень при работе и тем меньше срок его службы. Целесообразно принимать межцентровое расстояние больше минимального значения Lmin, причем делают его тем больше, чем ближе значение передаточного отношения к единице. Но во избежание чрезмерной вибрации применять очень длинные ремни не следует. Кстати, максимальное межцентровое расстояние Lmax легко вычислить по формуле:
Lmax
Похожие записи:
 Как настроить импульсный блок питания
Как настроить импульсный блок питания
 Как сделать резак для пенопласта своими руками?
Как сделать резак для пенопласта своими руками?
 Забор из поддонов своими руками: фото, дешево и красиво для дачи, как сделать из паллет на видео
Забор из поддонов своими руками: фото, дешево и красиво для дачи, как сделать из паллет на видео
 Нюансы оснащения зимней жерлицы в зависимости от условий ловли
Нюансы оснащения зимней жерлицы в зависимости от условий ловли
 Как починить кнопку на ноутбуке
Как починить кнопку на ноутбуке
 Вертикальные грядки для клубники: как правильно поливать и эффективно выращивать клубнику (120 фото + видео)
Вертикальные грядки для клубники: как правильно поливать и эффективно выращивать клубнику (120 фото + видео)