Содержание
Робот пылесос своими руками. Часть 2
Выдался выходной и пришли некоторые посылочки (прям как совпало). Распаковками мучать не народ нет желания, поэтому к делу. Решил все почти полностью разобрать чтобы удобней было внедрять новые «плюшки» ,а заодно и поведать о более детальном устройстве монстра)))
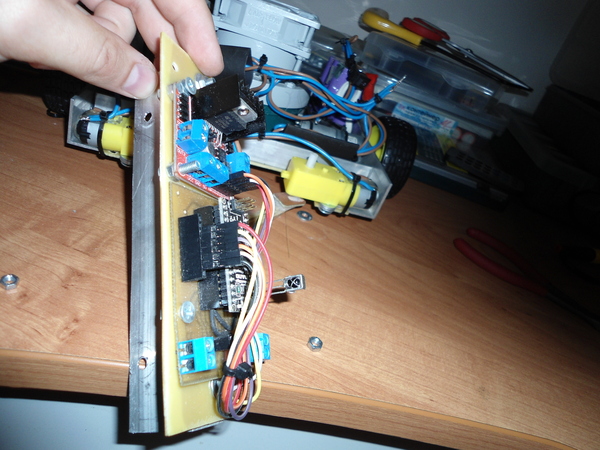
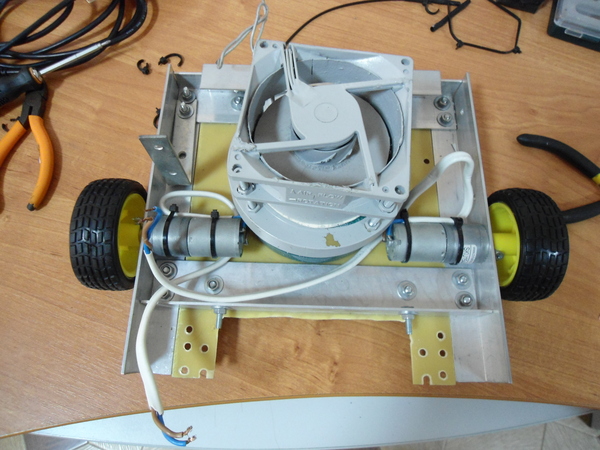
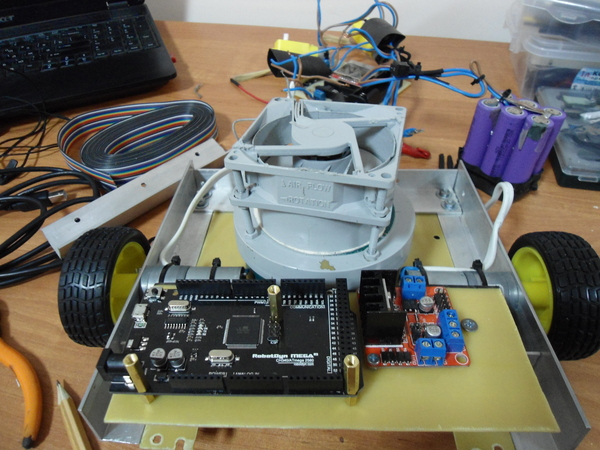
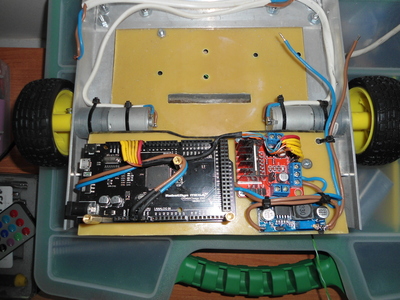
Снимаем самое сердце — электронику.

Крепится все на уголок для удобства разборки.
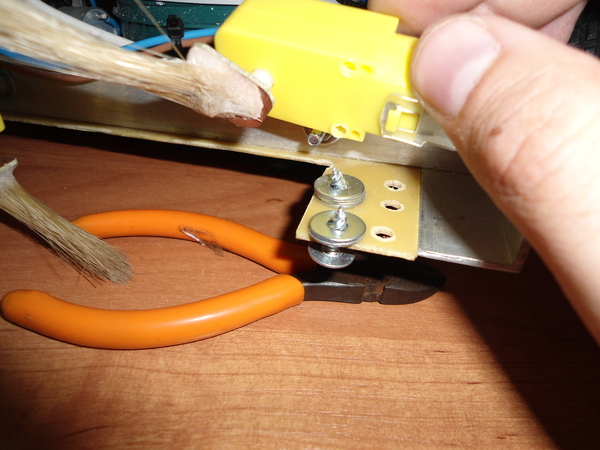
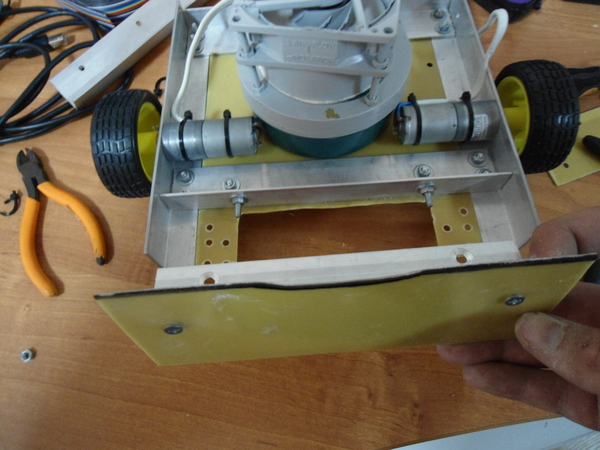
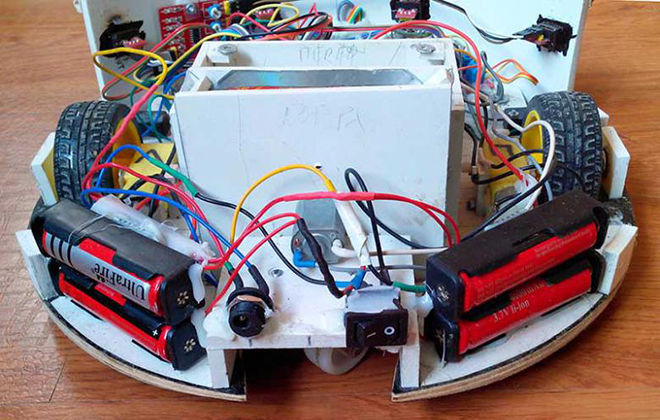
Снимаем «подметалки» . Шайбы компенсируют неровности самого мотор-редуктора.
Скидываем АКБ и DC-DC переобразователи. Кстати АКБ закреплял их стяжками к раме. Снизу все банки изолированы.

Вот кстати модель движка виднеется. Ссылки почти на все кину в конце поста.
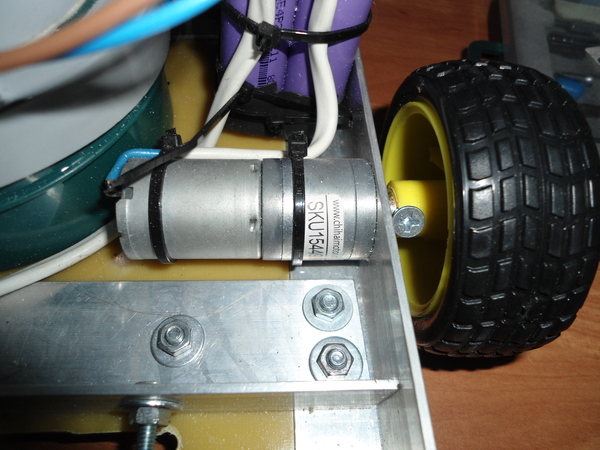
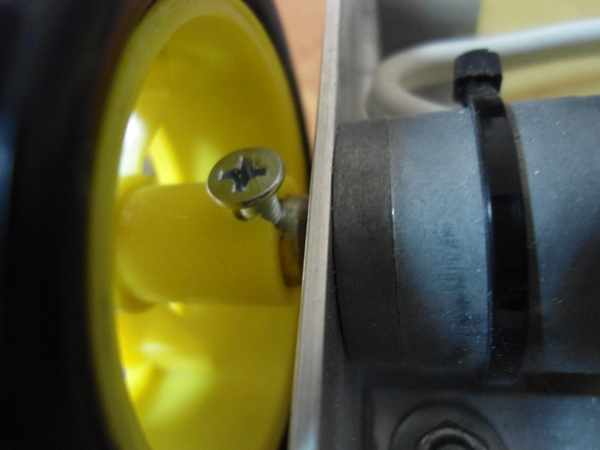
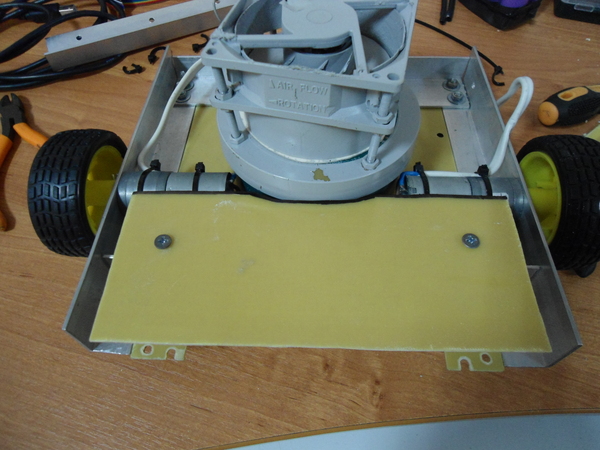
Вот попутно еще фото реализации крепления колес.
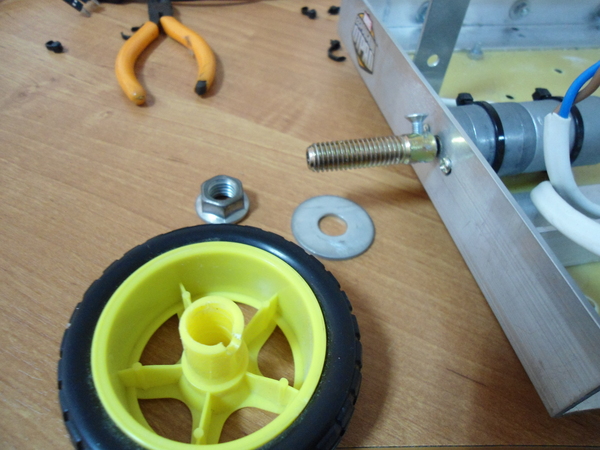
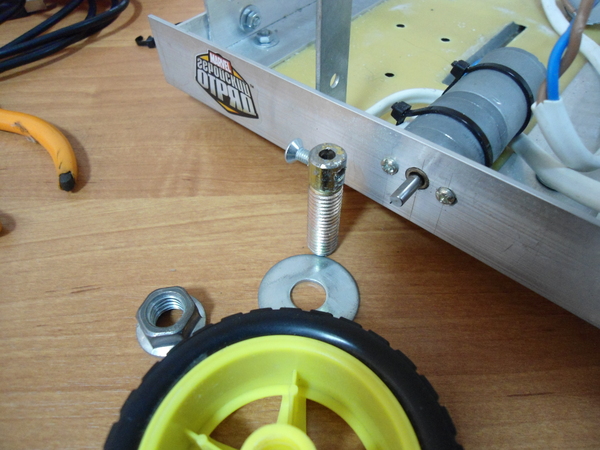
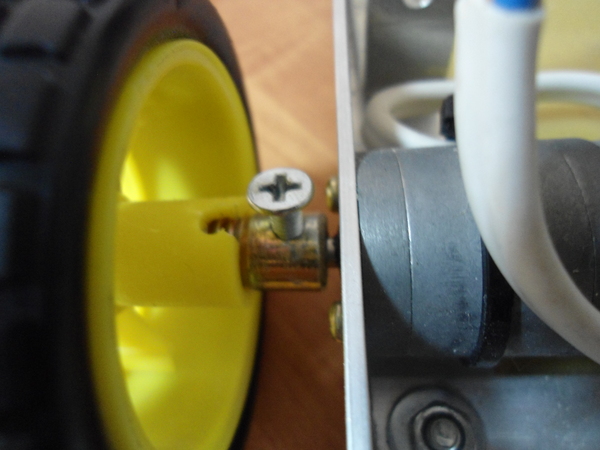
Выемку сделал специально чтоб колесо на оси не проворачивалось.
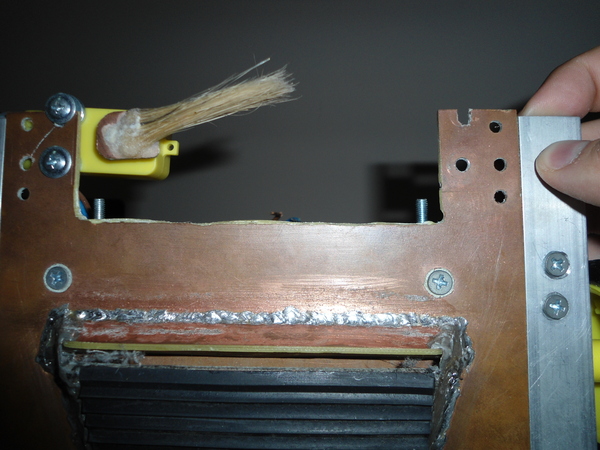
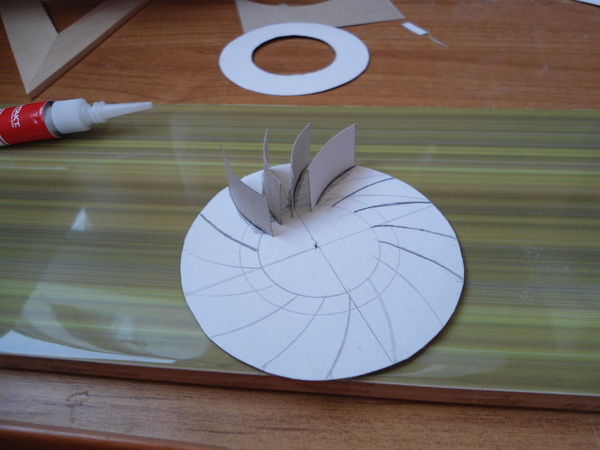
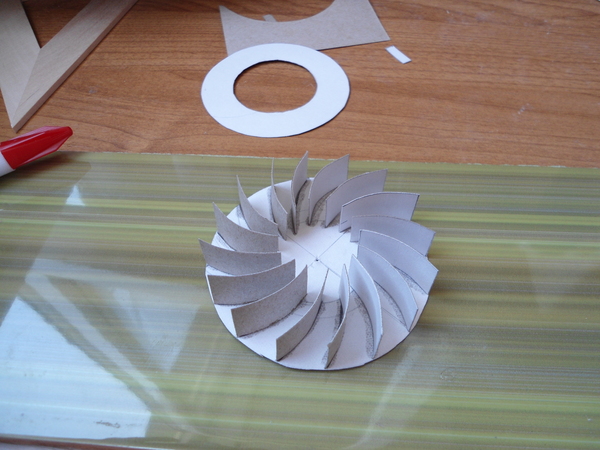
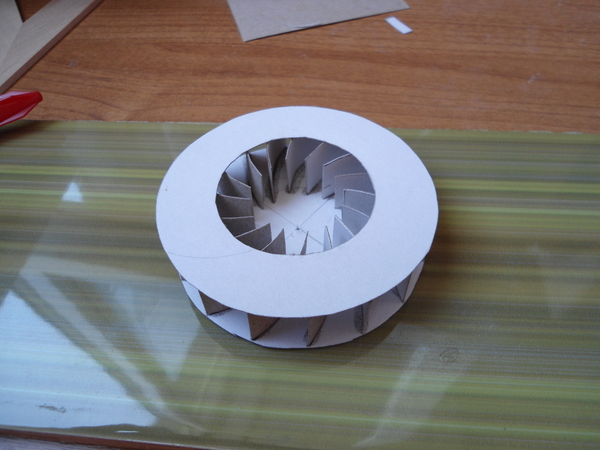
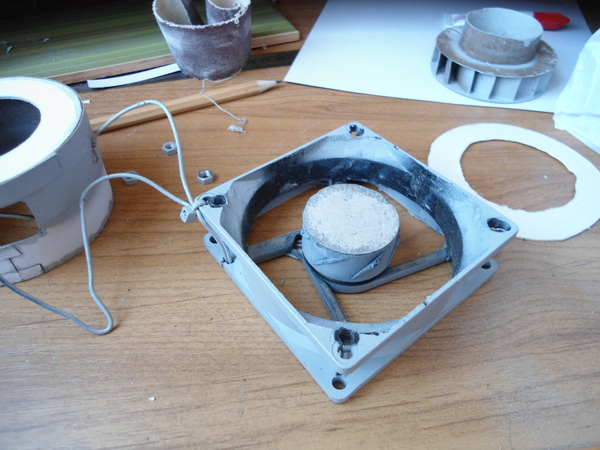
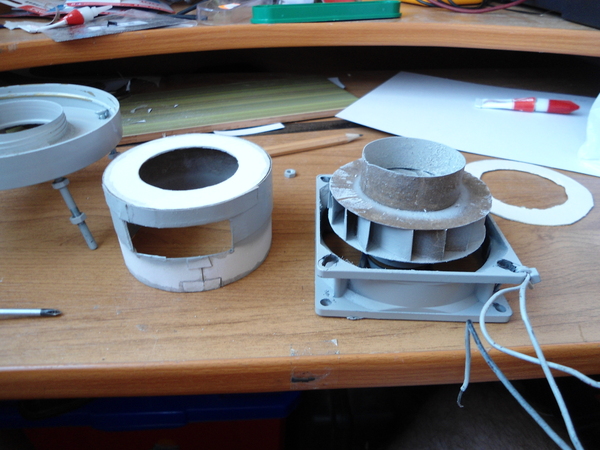
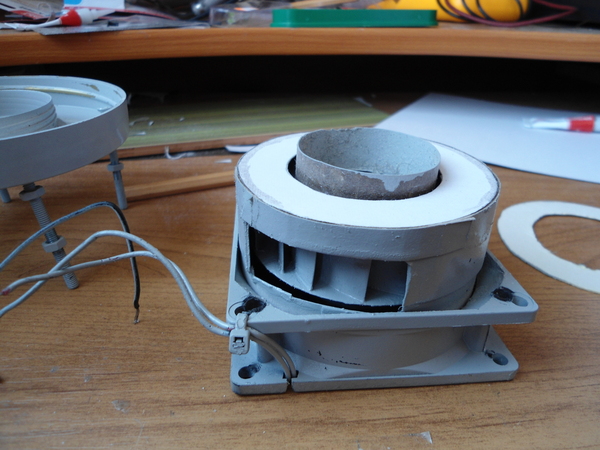
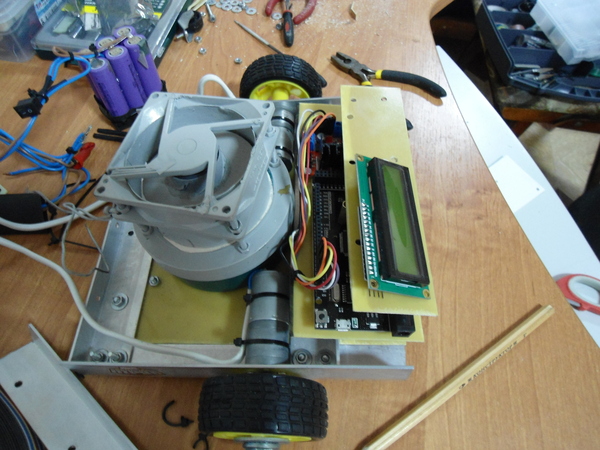
Теперь снимаем сам пылесос.
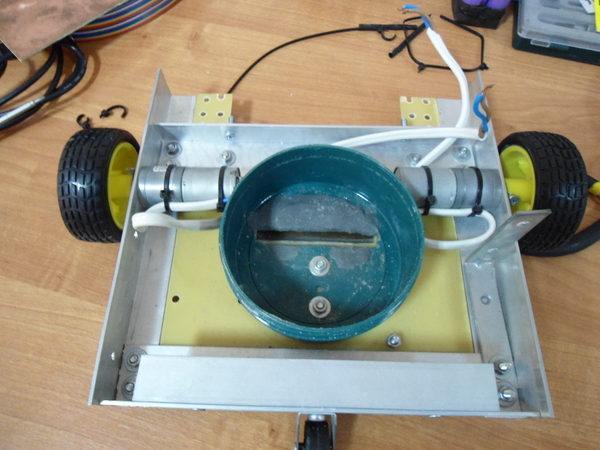
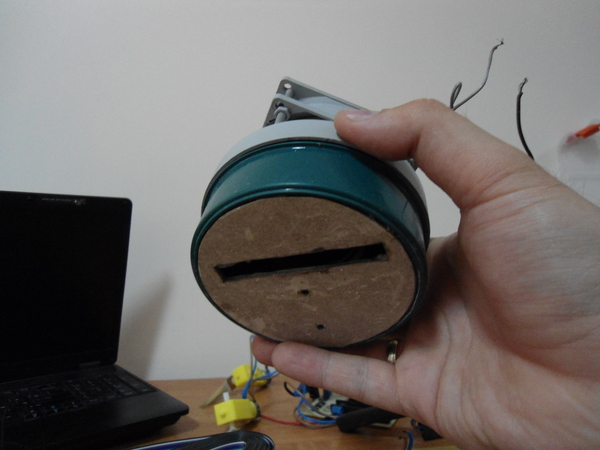
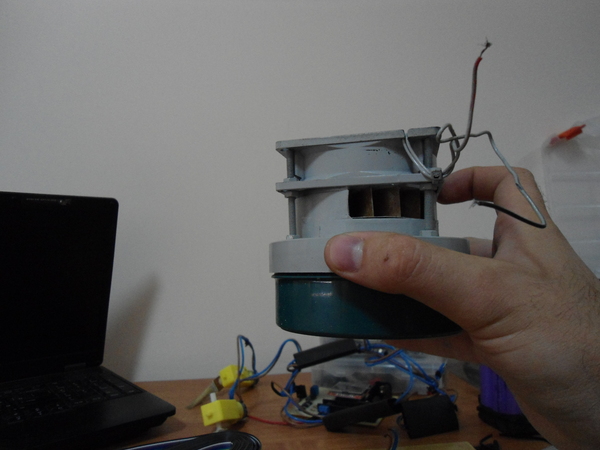

Попутно еще фотки самого устройства пылесоса.
Чертеж крыльчатки есть в прошлом посте.
Ну теперь продолжим с самим монстром. Делаем новую площадку под ардуино мега и драйвер двигателей.
И примеряем чтоб не задевало крышку пылесборника.
Крепим «Мегу» к площадке через латунные стоечки. А драйвер просто на болтики чтоб по высоте не мешал будущему второму этажу.
Прикидываем второй этаж для экрана и датчиков (которые кстати все еще не пришли)
Теперь по деталюхам :
Аллюминиевый уголок — стоительный магаз.
Критика (по делу) и идеи по улучшению приветствуются. Надеюсь пост будет полезен кому нибудь. ВСЕМ ДОБРА.
Жаль что датчики не пришли. можно было бы уже обкатывать.
Продолжение постройки будет по мере появления всего необходимого
Ты я смотрю тоже минусы людям не ставишь)))))
В каждом ардуинщике помирает электронщик травление не практикуешь?
не правда электронщик не умирает))) порой даже наоборот))) травлю платки по настроению. Благо опыт в это большой. Начинал еще в школьные годы с рисования дорожек нитролаком и травлением медным купоросом.
Тогда мне вас (в смысле ардуинщиков) не понять: плата стоит в 10 раз дороже чипа — это раз. Обвязку атмеге почти делать не надо — два. Каждый контакт который пин — 100% источник глюка в будущем, особенно на подвижной модели — три. Запилить себе платку, впаять несколько транзюков для управления двигателями, сделать выводы под программатор, экран, датчики и что там у тебя еще. хм. так похоже будет на вещь, а не на детскую поделку. (я прошу прощения, я ни в коем случае не учу и не навязываю своего мнения, просто в толк не возьму)
Что мне нравится в ардуинах так это модульность. Захотел что то изменить, заменил только часть конструкции а не всю конструкцию в целом. Так же ремонтопригодность отличная, а чтоб небыло глюков , я слегка приклеиваю пин (точнее их пластиковые части) к разьему горячим клеем, капли достаточно и шлейфы для готовой конструкции спаиваю всегда сам и креплю все провода стяжками. А по ценам китай радует клонами на любой вкус и малую цену: нано примерно 120 рублей с програматором на той же плате. Атмега 8 стоит примерно 55 рублей без платы и обвязки. Получается не сильно и дороже))). Можно самому паять всю конструкцию на одной плате когда сильно ограничено пространство корпуса. А глюки будут 100 процентов если собрать все на бредборде и так оставить в готовой подвижной модели.( Оскорбить чем либо никого не пытался. Все написанное мое чисто субьективное мнение)
А на сколько мощный такой пылесос получается? Он способен втягивать не только пыль и волосы, но и зерна, орешки, конфеты m&m например? Или тут все ограничивается мощностью двигателя?
Были проблемы с прочностью крыльчатки? Есть смысл её напечатать на 3д принтере, если возможность есть =)
Сам пылесос слабоватый. Тянет пыль, волосы, бумажки и тд. Но и работает тихо. Если поднять обороты раза в два (использовать другой двигатель) то тяга будет приемлимой, но и шуметь будет сильно, и энерго потребление будет высоким и сократится автономное время работы. Вот параметры которые мне нужны: тихая работа, долгое время автономной работы (по моим расчетам не менее 5 часов). А то что тяга самого пылесоса слабая то это для моих задач не решающий фактор, т.к и нужно лишь собирать мелкий мусор. А крыльчатку можно и на 3д принтере сделать и всю конструкцию самого пылесоса , но увы такой возможности нет..
Типы роботов-пылесосов, чем отличаются для влажной и сухой уборки

Автономные приборы очищают напольное покрытие несколькими способами, на этом основании их делят на три типа.
Аппараты для сухой уборки
Щетки пылесосов захватывают мусор и пыль, направляют к всасывающему механизму. Гаджеты поглощает сор, складируют в контейнере, очищают от пыли и выводят наружу воздух.
Устройства для влажной уборки
К недорогим моделям прилагается салфетка из микрофибры. Человек смачивает ее вручную, затем закрепляет в пазах, запускает робота. После этого электронный помощник одновременно собирает сор и протирает полы.
Популярные образцы снабжены съемным блоком. В него владелец наливает воду или моющее средство. Во время работы жидкость автоматически увлажняет салфетку, обеспечивая режим влажной уборки.
В конструкцию продвинутых образцов изобретатели добавили форсунку. В процессе работы робот распыляет из съемного блока воду, тут же вытирая ее вставкой из микрофибры.
Гаджеты для комбинированной уборки
Устройства с успехом проводят сухую и влажную уборку твердых покрытий, ковров.
Более высокую цену комбинированные модели компенсируют широким спектром применения и удобством эксплуатации.
Пазы для полотера
В моделях, в которых есть пазы для полотера, предусмотрена функция полировки пола. На дно робота крепится основание швабры, то есть техника одновременно всасывает пыль и протирает поверхность пола. На основание швабры надевается салфетка из микрофибры. Ее следует смочить перед запуском, так как намочить салфетку в процессе работы не получится, робот сбросит составленную карту движения при отрывании его от пола. Салфетка из мягкой ткани позволит собрать самую мелкую пыль и грязь, но не сможет заменить полноценную мойку полов.
Еще одной моделью робота пылесоса, которая отличается высоким качеством, эффективностью и многофункциональностью является Panda X900 Wet Clean. Эта модель способна выполнять полноценную влажную уборку, чем похвастаться могут далеко не все роботы-пылесосы.
Из сравнительно недорогих моделей можно обратить внимание на iBoto Optic. Этот робот-пылесос не выполняет влажную уборку на том уровне, как модель, о которой было рассказано выше, но при этом он великолепно справляется со своей основной задачей – т есть уборкой пыли
При этом, в нем установлена специальная камера, которая позволяет ему отлично ориентироваться в пространстве.
Процесс уборки
Многих интересует, как работает современный робот пылесос? Работа такого «помощника» происходит в несколько этапов, большинство из которых скрыты от человека.
- Сбор данных. После запуска устройства, бот сканирует помещение, определяя его размеры, фиксируя первоначальное расположение мебели.
- Составление карты помещения и прокладка маршрута, который представляет собой прямые линии от стены до стены.
- Пуск системы всасывания, щеток и движение по запланированному маршруту.
Сам процесс уборки не представляет особого интереса для пользователя. Прибор методично перемещается по составленному маршруту. Одновременно с этим боковые щетки сметают весь мусор к центру прибора к центральной турбине, которая отбрасывает загрязнения в сторону мусороприемника, куда разрежением всасываются пыль, мелкий мусор, волосы и шерсть животных и пр.
Этапом окончания процесса уборки является возврат прибора на базу для подзарядки. Владельцу «питомца» останется только вовремя очищать мусоросборник, фильтрующие элементы.

Прокладка маршрута

Перемещение по маршруту

Робот пылесос обходит препятствия

Боковые щетки сметают весь мусор к центру прибора
Возвращение на базу для подзарядки
Все современные роботы-уборщики являются беспроводными устройствами. Питание элементов прибора осуществляется от АКБ, которая разряжается во время уборки помещения. По достижению критических показателей емкости, бот начинает искать базу, для подзарядки. База оснащена инфракрасным маяком, на сигнал которого и движется прибор. На заметку! Более современные приборы с лазерной навигацией попросту заносят на виртуальную карту помещения расположение базы. Дополнительные конструктивные элементы
В зависимости от модели и назначения, бытовые модели роботов-уборщиков могут оснащаться:
- Дополнительной центральной турбощеткой. Щетки вращаются навстречу друг другу, обеспечивая более качественное удаление все загрязнения.
- Второй боковой щеткой, которая расширяет зону очистки за один проход.
- Различными фильтроэлементами. Наиболее популярны среди наших соотечественников устройства с дополнительным НЕРА фильтром на выходе. Такая система тонкой очистки воздуха удаляет до 99,96% всех загрязнений, включая бактерии, споры грибков и плесени, пыльцу растений и пр.
Некоторые модели роботов-пылесосов оснащаются дополнительными датчиками грязи, которые определяют участки, нуждающиеся в особо тщательной чистке.
Способы обеспечения движения, уборки и питания робота-пылесоса
Движение роботизированного устройства в общем случае осуществляется двумя способами: по спирали (с центра наружу) и зигзагами. В микроконтроллеры можно также занести и схемы комнат по отдельности.
Пространственную ориентацию, объезд препятствия на пути следования пылесос осуществляет благодаря встроенным контактным и инфракрасным датчикам — они образуют систему обратной связи. Инфракрасные регулируют движение, определяя расстояние до стен, предметов, перепады высот. Контактные датчики срабатывают в бамперах при ударах о препятствия (подробнее о том, как работает прибор — в статье принципы работы роботов пылесосов).
Автоматизированный пылесос с автономным источником питания, конечно же, не развивает такую мощность всасывания, как ручной вариант. Практические испытания показали большую эффективность использования маленькой щетки совместно с всасывающей турбиной. Для уборки по углам передняя часть пылесоса оснащается 2 щетками, которые при работе подгребают мусор к главной.
Питание роботизированной системы можно осуществлять от нескольких аккумуляторов, напряжение на клеммах которых – 12 V (18 V), а его емкость равняется 7 А*ч. Зарядка осуществляется при прямом контакте либо беспроводным способом. Применение последнего увеличивает расходы на комплектующие детали.
Любая автоматизированная модель собирается на базе контроллера (мозга системы). Поэтому следует изучить язык его программирования для занесения алгоритма команд. Следует также учитывать интуитивную направленность командного интерфейса, что значительно облегчает процесс. Как микроконтроллер, так и используемые датчики часто имеют стандартизированные разъемы для подсоединений, поэтому пайка требуется редко.
Требуемые компоненты
Для сборки пылесоса на Ардуино потребуются компоненты:
- блок управления;
- отдельный контроллер для управления работой электродвигателей (обозначается на схемах как H-Bridge);
- электрические двигатели постоянного тока с редукторами для привода боковых колес;
- комплект колес;
- источник питания (аккумуляторы или батарейки, суммарное напряжение 5 В);
- турбина (используется узел, предназначенный для охлаждения процессоров или чипов видеокарт);
- адаптер питания (при использовании компонентов, рассчитанных на напряжение 12 В);
- комплект магнитов;
- коммутационный шнур USB;
- комплект кабелей для подключения блока Ардуино к цепям оборудования;
- листовой плотный картон;
- термический клей в тубе;
- пистолет для нанесения клея;
- резервуар для сбора пыли (готовый пластиковый или металлический контейнер);
- пластиковые хомуты;
- металлическая банка от напитков (для изготовления крепежных элементов).
Принцип работы
Роботы-пылесосы, как и остальные бытовые электроприборы, эволюционируют. Последние выпущенные модификации подобных устройств кардинальным образом отличаются от первых моделей. Изначально умное оборудование не предусматривало возможности видеть объекты, а его способность к уборке нельзя было назвать идеальной. Другими словами, оно не могло составить конкуренции ручному мытью полов.
Современные аппараты, производимые такими известными фирмами, как iRobot, Yujin Robot, Panda Robotics, Xiaomi, могут качественно убрать любые поверхности, даже не совсем гладкие. Они оснащены сканерами и датчиками, позволяющими создать карту комнаты. Кроме того, нынешние домашние помощники знают, как не свалиться с лестничных ступенек и почистить угол, а также могут с поразительной аккуратностью избежать столкновения с препятствием, обойдя его.
Описание и назначение
Производители таких устройств оснащают свои изделия разными функциями. Это помогает сделать их работу более качественной. Для улучшения эксплуатационных характеристик используется виртуальная стена.
Под этим термином понимают особое приспособление, которое помогает пылесосу ориентироваться в комнате. Устройство дает возможность разделять помещение на зоны. Благодаря его использованию робот не сможет покинуть комнату, в которой проводится уборка. Виртуальная стена используется при потребности в ограничении доступа прибора к хрупким предметам. Это может быть напольная ваза или посуда с кормом домашних питомцев. В подобных ситуациях приспособление будет очень актуальным.
Изготавливаем корпус
Если сразу же захотелось сделать все правильно, то без корпуса для нашего пылесоса не обойтись. Для этого нам понадобится пластик – полистирол, поливинилхлорид.
Предварительно нужно прикинуть, как начинка разместится внутри корпуса. Если пойти по пути наименьшего сопротивления, то можно взять за основу эргономику любого готового пылесоса. Обычно они дисковой формы, примерно одинаковые по размерам. Значит, понадобится вырезать (изготовить) 2 круга одинакового диаметра и боковую стенку (сплошная полоса) пылесоса.

В зависимости от питания выделяется батарейный отсек. Лучше всего использовать широко распространенные АКБ 18650 – такие есть в ноутбуках, применяются в игрушках и пауэрбанках. Датчики движения размещаются впереди, они отвечают за «поведение» пылесоса. Непременно нужно учесть размещение колес, их приводов, центральной платы (Arduino) и турбины с пылесборником.
От правильности расчета, тщательности компоновки деталей зависит, придется в скором времени кардинально переделывать конструкцию пылесоса или ограничиться небольшой модернизацией. Размеры корпуса привязаны к типу микроконтроллера, дополнительных плат.
В оригинальном Arduino предусмотрено 3 градации: «Uno», «Pro», «Leonardo», а также платы с дополнительными разъемами («Mega», «Due»). Есть также и более компактные варианты – «Nano», «Micro». И это не считая многочисленных китайских клонов, которые ничуть не хуже по функционалу. Зато зачастую гораздо дешевле.
Поэтому лучше заранее предусмотреть указанные факторы. А уже потом начинать реализацию своей идеи, изготавливать корпус пылесоса. Меньше 30 сантиметров диаметр делать не стоит. Иначе ничего не поместится. Лучше затем использовать свободное пространство для добавления АКБ или расширения пылесборника.
Также конструкция корпуса должна учитывать возможность разборки, ремонта пылесоса. Поэтому рекомендуется сделать съемные крышки или лючки для обеспечения доступа к внутреннему пространству. Это займет чуть больше времени, чем просто изготовление пластиковых деталей. Возможно, даже придется сначала сделать макет пылесоса, нарисовать робота на бумаге.

Зато такой тактический ход избавит от множества проблем, связанных с перекомпоновкой, переделкой пылесоса. Зачастую устранение таких сложностей требует больших усилий, чем первоначальный расчет, размещение узлов с учетом перечисленных требований.
Не помешает также учесть, что микроконтроллер Arduino потребует прошивки, смены ПО. Для этого обязательно нужно вывести разъем, через который «мозг» робота станет подключаться к большому ПК. А уже после того, как определены все главные моменты, можно приступать к воплощению идеи пылесоса в реальность.
При выборе корпуса из ПВХ, полистирола для сборки используют соответствующий по составу клей. Он не подойдет для склейки деталей, отлитых из эпоксидной смолы. И для плит, изготовленных из «эпоксидки», клей тоже должен быть свой
Это важно понимать
Можно собрать корпус пылесоса даже и из тонкой (до 5 миллиметров) фанеры. Большая толщина приведет к увеличению веса. Меньшая не обеспечит требуемую жесткость. Работа с древесиной не представляется сложным занятием: детали выпиливаются лобзиком, ошкуриваются, подгоняются по размерам и склеиваются.
И, наконец, вариант для самых ленивых – найти корпус от негодного робота-пылесоса или купить готовый в одном из сетевых магазинов. Но в этом случае следует заранее подобрать комплектующие с учетом габаритов. Иначе придется менять что-то одно: или корпус, или детали.
Плюсы и минусы умного помощника
Поддержание чистоты без участия человека следует отнести к основному достоинству гаджета. Его удачно дополняет ряд других плюсов:
- Вариативность использования. Новыми моделями можно управлять дистанционно. Достаточно открыть приложение на смартфоне, планшете, чтобы отдать аппарату соответствующую команду. Если запрограммировать устройство, оно будет делать уборку в строго определенные часы и дни недели.
- Удобство. После запуска робот сам составит карту помещения, сделает уборку, затем вернется к базе. Хозяину остается только периодически очищать контейнер, фильтр и щетки. Это особенно ценно для людей с ограниченными возможностями.
- Безопасность. Прибор самостоятельно устраняет пыль, собирает шерсть животных, делает влажную уборку, снижая риск обострения у лиц, страдающих аллергическими заболеваниями, бронхиальной астмой.
- Компактность. Умного помощника не надо устраивать в кладовке на хранение или подыскивать другое подходящее место.
Стоит учитывать, что гаджет не способен полностью заменить традиционные способы уборки. Есть у него и прочие минусы:
- Пылесос не устраняет загрязнения в углах помещения. Этому препятствует форма аппарата, небольшая сила всасывания и длина щеток.
- Работу щеток блокируют провода, шнурки, наматываясь на них.
- Степень очистки ковров с ворсом больше 1.5 см может не устроить владельца.
- Контейнер надо регулярно освобождать от мусора, фильтр чистить от пыли, с колесных осей убирать намотавшиеся на них нитки, длинную шерсть домашних животных, волосы.
- Устройство не справляется с вязкими загрязнениями – экскрементами собак, кошек, соусами.
- Стоимость качественного миниатюрного помощника выше, чем у обычного пылесоса.
Аппарат отлично выявляет препятствия большого размера, но не всегда адекватно воспринимает игрушки, носки, предметы незначительного размера. Чтобы обеспечить качественную уборку, перед запуском помощника их следует убрать с пола.
Основные требования при создании
- Созданный пылесос должен быть цилиндрической формы, и не очень высоким (ему необходимо попадать под тумбочки, столы, прочее).
- Диаметр колес выбирать с учетом возможности саморазворота.
- Колесо ответственное за «подруливание» обходится без мотора.
- Контактный бампер очень важная составляющая, без него не обойтись, также необходимо учитывать, что он должен занимать не менее половины периметра всего робота.
- У робота, идеального сцепления можно достичь если центр тяжести буде совпадать с колёсами.
- Максимальная практичность мусоросборника, он должен вынимать одним движением.
Навигационная система
Навигация роботу нужна, чтобы понимать, где он находится в пространстве. Проблем с навигацией быть не должно. От качества навигационной системы зависит поведение робота во время уборки и качество ее выполнения. В роботах-пылесосах используется три типа систем навигации. Каждая имеет свои особенности, а все вместе показывают, как работает робот-пылесос.
Датчики пылесоса
Инфракрасные сенсоры установлены во фронтовой части гаджета на колесах и позволяют фиксировать препятствия и реагировать на них. Дополнительно, в корпусе используется датчик удара, который взаимодействует с системой навигации. Если уборщик оказался рядом с препятствием, он останавливается, алгоритм просчитывает новую траекторию движения и устройство таким способом обходит мешающие движению элементы.
Для более качественной уборки могут внедрятся ИК-датчики. Они позволяют вымерять расстояние под мебелью, чтобы случайно не застрять там во время уборки.
Внешние датчики
Они размещаются по комнате и взаимодействуя с ними, устройство лучше ориентируется. Есть две схемы работы внешних датчиков навигации:
- Маяки (разрешающие). ИК-сигнал транслируется непрерывно, а его потеря свидетельствует о том, что нужно менять траекторию движения.
- Виртуальная стена (запрещающая). Все внешние ИК-датчики создают так называемую ограничительную стену из луча, которая видна только роботу. Если умный уборщик детектирует стену, он автоматически меняет маршрут передвижения, не заходя в те участки дома, которые ограждены специальным прибором.
Лазерная навигация
Самый технологичный тип навигации. Гаджет использует установленные лазеры, чтобы сканировать комнату, выясняя расстояние от себя до ближайшего объекта. Так же лазеры помогают с определением расположения. После анализа данные записываются в память устройства, а специальные алгоритмы и программы конвертируют полученные данные для наброса карты убираемой комнаты.
Подготовка к практической реализации проекта
Рассмотрим применение вышеизложенных принципов на базе платформы Arduino Mega 2560. Процесс создания будет состоять из нескольких этапов:
- подготовка инструментов и материалов;
- изготовление корпуса с колесами и отделом под мусор, пылесборника и турбины;
- монтаж датчиков и микроконтроллера, моторов с редукторами, аккумулятора, щеток;
- выполнение электрических подключений;
- введение программы в Arduino, определение согласованности датчиков;
- проверка работоспособности робота-пылесоса и его способности заряжаться самостоятельно.
Идея реализуется с помощью следующих материалов и инструментов:
- контроллер Arduino – 1 шт, с драйверами;
- лист фанеры (либо плотный картон) – 1 м.кв;
- колеса – 3 шт;
- провод сечением не более 0,75 мм.кв (подойдет витая пара) – около 2 м;
- блок питания – 4 аккумулятора по 18 V, индикатор заряда к ним, зарядное устройство;
- инфракрасные датчики – 4 шт, контактные – 2 шт;
- электродвигатели: для турбины – 1 шт, вращающий щетку – 1 шт, 2 мотора с редуктором обеспечивают передвижение;
- поливинилхлоридный корпус – 1 шт;
- клей – 1 упаковка, саморезы – 10 шт, скотч – 1 шт, набор магнитов;
- набор отверток и сверл, плоскогубцы, нож канцелярский, карандаш, линейка, шуруповерт, электролобзик.
Чертеж
Самостоятельно изготовить чертеж сложно, его проще скачать с интернета
При выборе наиболее подходящего проекта уделяется внимание следующим моментам:
- Размеру пылесоса. От этого показателя зависит эффективность устройства. Рекомендуемый диаметр составляет 30 см, высота не более 15 см. В противном случае пылесос не сможет собирать пыль под невысокой мебелью.
- Размещению колес. На момент движения пылесос должен быть устойчивым. Рекомендуется создавать 2 ведущих, которые расположены параллельно, а также 1 управляющий, за счет которого проводится поворот устройства.
- Размеру контейнера для пыли и мусора. Этот элемент является основной частью конструкции.
- Расположению других элементов пылесоса.

При применении чертежа можно создать качественное устройство, которое сможет прослужить в течение длительного периода. Многие элементы самодельного пылесоса-робота придется приобрести в специализированном магазине.
Промежуточный итог
Цель достигнута: пылесос разговаривает. Я рад, что не стал городить слишком много сразу всего. Следующий шаг связать распознавание образов с потоком, регулирующим движение, а также попробовать transfer learning.
Искусственный интеллект, тема настолько объемная, что сложно определить, за что взяться в первую очередь. На мой взгляд не существует единой точки входа. Совсем не обязательно начинать с вычисления сложных производных или курсов программирования на Python (хотя и то и другое безусловно полезно). Выбирайте то, что интересно лично вам, и да пребудет с вами сила довести начатое до конца.





