Содержание
Самодельный велосипед с мотором — Велобаджо

Если вы загорелись желанием сделать велосипед с мотором своими руками, то готовьтесь к тому, что вам придется немного потрудиться. В этой статье расскажем, как установить мотор колесо на велосипед и как сделать велосипед с мотором от бензопилы своими.
- Велосипед с мотором своими руками: установка мотор колеса
- Велосипед с мотором от бензопилы своими руками
Самым простым и доступным способом сделать велосипед с мотором своими руками является установка мотор колеса. Подключение мотор колеса — это не такая простая задача, как может подумать человек, никогда с этим не сталкивавшийся. Самой трудной частью данного процесса является подключение электрики.
Купив мотор-колесо, вы становитесь так же обладателем контроллера, системы Pas, ручки «газа», зарядного устройства и ручки тормоза, которые идут в комплекте.
Поскольку работать мотор-колесо заставляет переменный ток, необходимость контроллера обусловлена потребностью преобразовать постоянный ток от АКБ в переменный.
На специальных тормозных ручках расположен микровыключатель, созданный для того, чтобы отсекать ток питания от мотора в момент торможения.
Для собственноручной установки мотор колеса, понадобится выполнить следующие действия:
- Первым делом, нужно поставить велосипед колесами кверху, и провести демонтаж старого заднего колеса. На место старого колеса нужно будет установить новое колесо с электромотором. Мотор-колесо устанавливается так, чтобы пучок силовых проводов находился слева, по направлению движения велосипеда. Если это требование не будет учтено, то мотор-колесо просто будет крутиться в другом направлении.
- После закрепления мотор колеса, потребуется закрепить батареи на велосипедную раму и подключить контроллер. Подключая контролер, очень важным моментом является его дополнительная изоляция. Можно, к примеру, защитить прибор целлофановым пакетом.
- Далее ведется подключение остального оборудования. Не стоит забывать, что всю электронику нужно подключать к АКБ через плавкий предохранитель на 20А, он не даст системе сгореть, если случится короткое замыкание. Подробную схему по монтажу и подключению вы найдете в комплекте поставки мотор колеса.
Велосипед с мотором от бензопилы своими руками
Со временем, многим велолюбителям надоедает просто крутить педали, и их инженерный талант и фантазия толкают их на такой шаг, как установка двигателя на велосипед. В качестве «донора» для мотора отлично подойдет бензопила. Но вот, как собрать велосипед с мотором от бензопилы своими руками? В этом и попробуем разобраться.
Возьмем двигатель от бензопилы, мощность которого равна 1,5 л.с. Многие усомнятся, что мотор такой мощности сдвинет с места велосипед со 100-килограмовым велосипедистом, но, поверьте, не стоит беспокоиться: велосипед будет без труда разгоняться и набирать скорость 30–35 км/час.
Ради справедливости, нужно сказать, что разгон быстрым не назовешь, но езде это не мешает. Что хорошо, так это то, что с таким мотором вы почти не будете чувствовать запах бензина, что делает возможным такую опцию, как хранение дома.
Естественно, во время езды раздается треск, как от обычной бензопилы, что означает, что двигаться вы будете с довольно громким звуком.
Крепление втулки, к которой осуществляется натяжение ремня от двигателя, выполняется специальными шайбочками и винтиками. Существуют втулки различных диаметров для разных колес: от самых маленьких до просто огромных, под 28-дюймовые колеса.
Внутри у данных втулок прорезиненная поверхность. Исходя из сказанного ранее, не сложно догадаться, что приводной ремень нужно подбирать, учитывая диаметр втулки и диаметр колеса. Важным моментом является и то, что втулка должна быть закреплена ровно, исключая любые перекосы.
Рычаг «газ». Его управление производится при помощи тросика, регулирующего угол, на который отклонится заслонка в карбюраторе двигателя. Данный рычаг похож на тормозной от велосипеда, это значит, что газовать вы будете, не поворачивая ручку, как в мопеде, а нажимая на рычаг, как в бензопиле.
Подытожим результат, который вы должны получить: великолепный мотовелосипед по низкой цене. Очень шустрый и приносящий море удовольствия. Хотя, в подобном варианте есть и свои минусы: из-за шума, каждая собака в дачном поселке считает вас личным врагом, пытаясь вас догнать и укусить!
http://2kolesa.com.ua/kak-sdelat-velosiped-s-motorom-svoimi-rukami/
Устройство двигателя
Для разработки контроллера необходимо разобраться с принципом работы самого электродвигателя.
Электродвигатель состоит из фазных обмоток, магнитов и датчиков Холла, отслеживающих положение вала двигателя.
Конструктивно электродвигатели делятся на два типа: инраннеры и аутраннеры.
У инраннеров магнитные пластины крепятся на вал, а обмотки располагаются на барабане (статоре), в этом случае в движение приводится вал. В случае аутраннера всё наоборот: на валу — фазные обмотки, а в барабане — магнитные пластины. Это приводит в движение барабан.
Так как у велосипеда колесо крепится валом на раму, то здесь применителен тип аутраннера.
На этой картинке условно представлены три фазы с обмотками, соединёнными между собой. В реальности обмоток намного больше, они располагаются равномерно с чередованием по фазам по окружности двигателя. Чем больше обмоток — тем плавнее, чётче, эластичнее работает двигатель.
В двигатель устанавливаются три датчика Холла. Датчики реагируют на магнитное поле, тем самым определяя положение ротора относительно статора двигателя. Устанавливаются с интервалами в 60 или 120 электрических градусов. Эти градусы относятся к электрическому фазному обороту двигателя. Необходимо учитывать, что чем больше в двигателе обмоток на каждую фазу, тем больше происходит электрических оборотов за один физический оборот мотор-колеса.
Обмотки трёх фаз в большинстве случаев соединяются между собой по двум схемам: звезда и треугольник. В первом случае ток проходит от одной из фаз к другой, во втором — по всем трём фазам в разной степени. Иногда эти две схемы подключения комбинируют в одном двигателе, например в электромобилях. При старте и наборе скорости идёт соединение фаз по звезде: она даёт больший момент при относительно низких оборотах; далее, после набора скорости, происходит переключение на треугольник, в результате количество оборотов увеличивается, когда уже не нужен большой крутящий момент. По сути, получается условно автоматическая коробка передач электродвигателя.
Типы контроллеров для электровелосипедов
По типу обратной связи с двигателем контроллеры подразделяются на: предназначенные для работы с датчиками Холла; предназначенные для работы без датчиков; универсальные, способные работать как с датчиками Холла, так и без.
Контроллеры различаются по форме выходного сигнала: одни создают сигналы прямоугольной формы (так называемый меандр, такие контроллеры обычно дешевле),
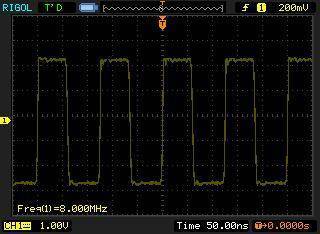
другие могут создавать чистую синусоиду. Существует и промежуточный вариант «модифицированная синусоида», можно сказать сглаженный меандр, но такие контроллеры не пользуются популярностью.
При использовании меандровых контроллеров Вы получите немного большую скорость вращения, чем при использовании синусных, но за это придется расплачиваться повышенным шумом двигателя, возникающем из-за микровибрации обмоток двигателя под действием сигнала такой формы. При использовании синусного контроллера Вы будете наслаждаться тишиной, но немного потеряете в максимальной скорости при таком же напряжении батареи.
Контроллеры могут по-разному реагировать на сигналы ручки газа, в одних вы управляете скоростью, в других мощностью, или даже крутящим моментом.
Мостовые драйверы
Далее предстояла работа над напряжением 20 вольт на управление затворами. Для этого существуют мостовые драйверы транзисторов, они обеспечивают стабильные импульсы в 20 вольт на затвор и высокую скорость отклика. Сначала у меня были популярные драйверы для маломощных моторов L293D.
Для управления затворами его достаточно, к тому же их очень просто использовать. Один такой драйвер может обеспечить питанием две пары ключей. Поэтому я взял две штуки L293D. Собрал контроллер с этими драйверами, и колесо начало крутиться существенно плавнее, посторонних звуков стало меньше, нагрев транзисторов уменьшился. Но при увеличении оборотов синхронизация с контроллером пропадала, появлялся посторонний звук, колесо дёргалось, вибрировало и полностью останавливалось.
В это же время я наткнулся на два варианта мостовых драйверов:
- HIP4086
- IR2101
Что касается HIP4086, то это полноценный мостовой драйвер, предназначенный для трёхфазного электродвигателя. Мне он показался несколько замороченным, и мои попытки использовать его в контроллере не увенчались успехом: он у меня так и не заработал. Углублённо разбираться в причинах не стал.
А взял я IR2101 — полумостовой драйвер, обеспечивающий работу нижнего и верхнего ключей для одной фазы. Несложно догадаться, что таких драйверов нужно три. К слову, драйвер очень прост в использовании, его подключение происходит безболезненно и легко. Получилась такая схема:
Печатная плата
И готовый результат
Собрал контроллер с этим драйвером и запустил двигатель. Ситуация с работой электродвигателя кардинально не поменялась, симптомы остались те же, как и в случае с драйвером L293D.
Как еще упростить езду на велосипеде ? Купить электроколесо
Езда на велосипеде — это, без всякого сомнения, полезно, интересно, просто. Но все же обычная езда утомляет, от нее болят ноги, хочется отдохнуть, но нужно продолжать крутить педали. Прекрасный способ совместить приятное с полезным — это купить мотор колесо для велосипеда и установить его. Наслаждайся дорогой до работы без пробок и без усилий или пусть ваш ребенок побудет в роли настоящего мотоциклиста. Все это легко устроить, установив на механический транспорт электроколесо к велосипеду. Его можно монтировать не только на велосипед, но и на скутер или самокат, все зависит от изобретательности мастера. Комплект мотор колесо отлично подойдет для воплощения фантазии в реальность. Электродвигатель для велосипеда — отличный агрегат, чтобы превратить обычного «железного коня» в электровелик. В этом случае не нужно тратиться на топливо, достаточно следить за зарядом аккумулятора. Такой транспорт — лучший вариант для езды на небольшие расстояния, например, в парк на прогулку или на работу в теплое время года, главное, чтобы расстояние не превышало предельно допустимые километры, которые указаны в инструкции к электро веломотору — в среднем, это от 15 до 30 км. Теперь вам будут не страшны пробки, езжайте прямо по тротуарам и пешеходным дорожкам. У нас на сайте Вы можете купить моторколесо с гарантией.
Какое выбрать электроколесо. Выбор мотор колеса
Когда вы решитесь собрать электровелосипед, определитесь, хотите ли вы переднее мотор колесо или же мотор колесо заднее, а может оба сразу. При покупке будьте внимательны, т. к. комплект предназначен строго для определенного колеса и не подойдет к другому. Для мощного двигателя рекомендована задняя ось. Купив привод на переднее колесо, вы обеспечите привод на заднее, если время от времени крутить педали. К тому же, на таком велосипеде легко справляться со сложными участками дороги, например, с грязью. Задняя ось остается неприкасаемой — это тоже плюс. Электро колесо для велосипеда намного проще монтировать на переднюю ось, но сюда не следует устанавливать мощное мотор колесо в целях безопасности. Задний привод обеспечивает отличную тягу на подъемах, но установка более трудоемкая
Многим велолюбители уделяют особое внимание эстетической стороне вопроса. Здесь электрическое колесо практически незаметно и не слишком загрязняется
Полного привода с одним задним мотор колесом не получится. Это не проблема — можно установить два колеса с мотором. Тогда вашему велосипеду будут нипочем любые препятствия и расстояния. Мотор колесо редукторное, благодаря редуктору, легче остальных, и при езде, когда крутишь педали или поднимаешься в горку, не ощущается большая нагрузка. Выбрать такое моторколесо на велосипед не сложно, предварительно ознакомившись с технической характеристикой. В нашем магазине вы найдете необходимые вело моторы, также мотор колесо с редуктором и мотор колесо с рекуперацией с различными техническими характеристиками по привлекательным ценам. Некоторые комплекты оснащены современными LCD дисплеями. За качество можете не переживать — мы сотрудничаем только с проверенными производителями уже несколько лет. Теперь вы знаете, где купить мотор колесо в Москве.
Читайте так же: Виды мотор-колес для электровелосипеда Мотор-Колесо Шкондина Мотор-колесо Смирнова Мотор-колесо Дуюнова
Подключите к контроллеру провода мотора: разъём датчиков холла и фазные провода
Чёрный водонепроницаемый разъём совмещает датчики холла и фазные провода. Стрелки на обоих разъёмах должны ровно указывать друг на друга. Разъём нужно вставить до линии. Это может быть непросто
Mark I (Light+, Classic)
Белый шестипиновый разъём «мама» и три цветных разъёма Anderson, подключаемых по цветам.
Иногда ответный белый разъём со стороны мотора бывает не собран, в таком случае нужно его собрать, затолкав контакты так, чтобы все цвета полностью совпадали.
Mark II, Infineon
Белый шестипиновый разъём «мама» и три чёрных разъёма XT150, подключаемых по цветам проводов.
Если у мотора есть несколько комплектов датчиков холла — подключить нужно только один.
Что такое контроллер для электровелосипеда?
Контроллеры приводят в действие моторные колеса, регулирует скорость и вращение, а также обеспечивает правильную остановку
Контроллер считает одной из главных частей электровелосипеда, так как отвечает за совершенные действия. Он обеспечивает переход тока к электродвигателю.
Такая конструкция позволяет:
- включать и выключать электронику;
- регулировать работу мотор-колес;
- позволяет устанавливать ограничитель скорости;
- осуществляет круиз-контроль;
- ускоряет двигатель до трехскоростного режима;
- отвечает за рекуперативное торможение;
- позволяет всем параметрам отображаться на панели управления;
- осуществление обратного хода.
Главные функции контроллера делят на:
- регулировку движения велосипеда;
- осуществление крутящего момента;
- защищает электродвигатель.
Параметры блока управления
Контроллеры обеспечены основными параметрами, благодаря которым электромоторы и батареи могут работать:
- Максимальный постоянный ток. Значение, которое отвечает за максимальный ток, который держит контроллер в течение установленного времени.
- Максимальный пиковый ток. Значение, которое выдерживается на минимальном отрезке времени. Данное число обычно гораздо больше, чем значение постоянного тока. Пиковый ток наблюдается при резком старте, когда в транспорте развивается большой крутящий момент.
- Максимальное напряжение аккумуляторов. Значение максимального количества используемых аккумуляторных банок. Если происходит повышение напряжения, контроллер может сгореть или выйти из строя. Разные модели имеют свой показатель напряженности. В основном они рассчитаны на 24, 48 и 60V.
- Внутреннее сопротивление. Данный параметр не является важным. Чем больше мощность контроллера, тем меньше сопротивление.
- Частота подачи импульсов. Значения данного параметра зависят от вида мотор-колес.
История
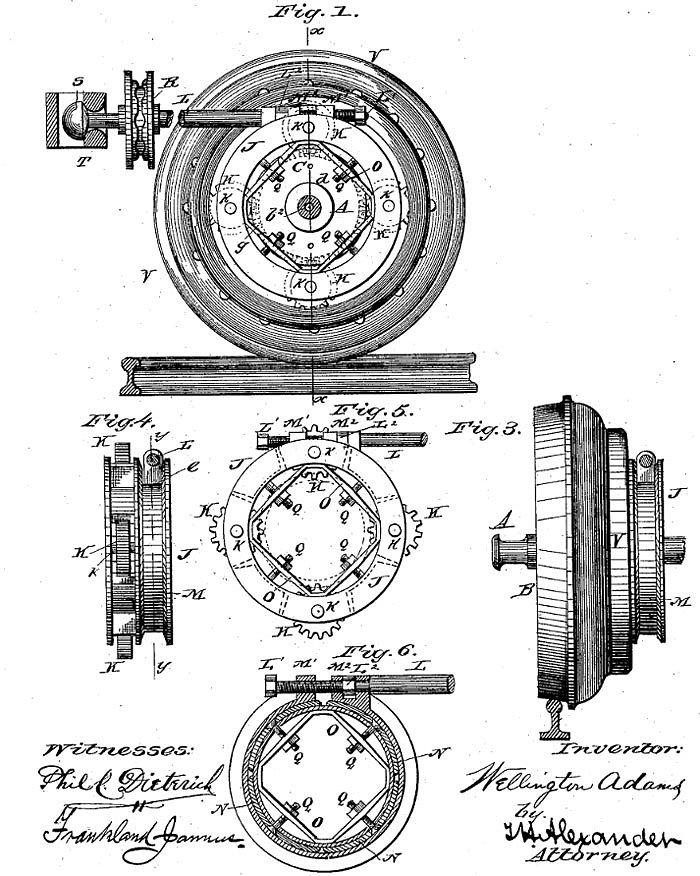
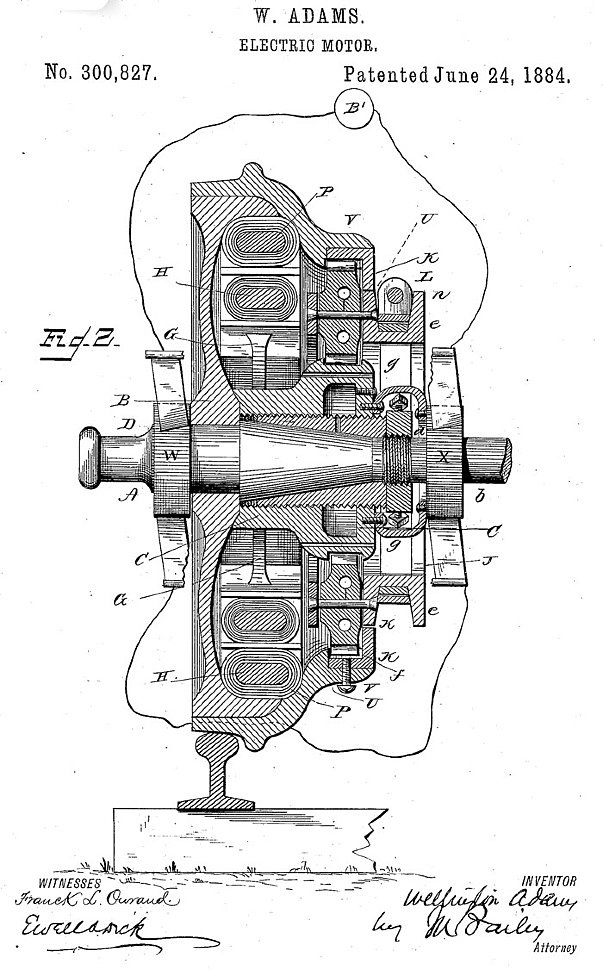
Изобретение мотор-колеса
Автор концепции первого колесного двигателя – Веллингтон Адамс из Сент-Луиса. Патент США 300 827, 1884 год.
В 1890 году Эдвардом Паркхерстом из Воберна, штат Массачусетс, изобретен двигатель с высоким крутящим моментом и низким числом оборотов в минуту. Двигатель был встроен в колесо.
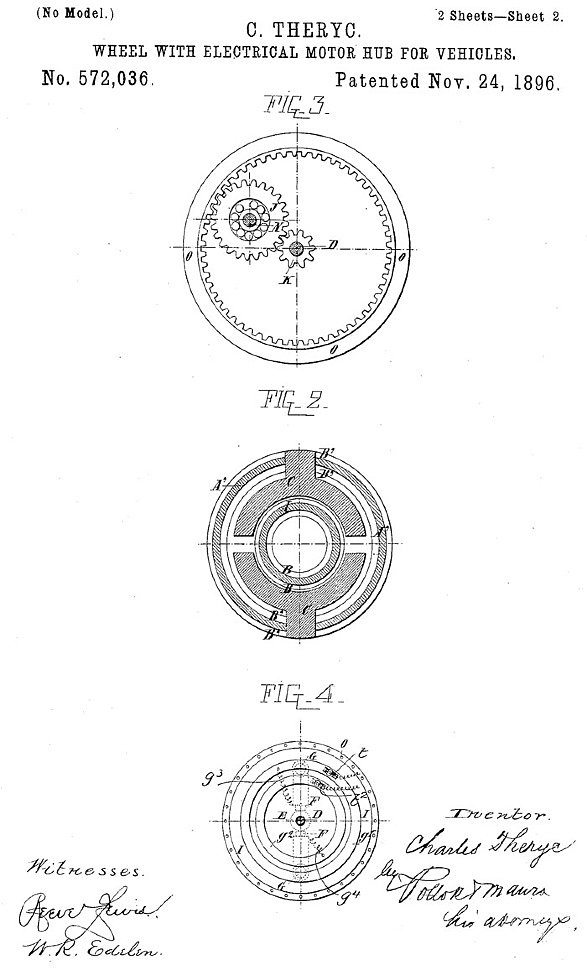
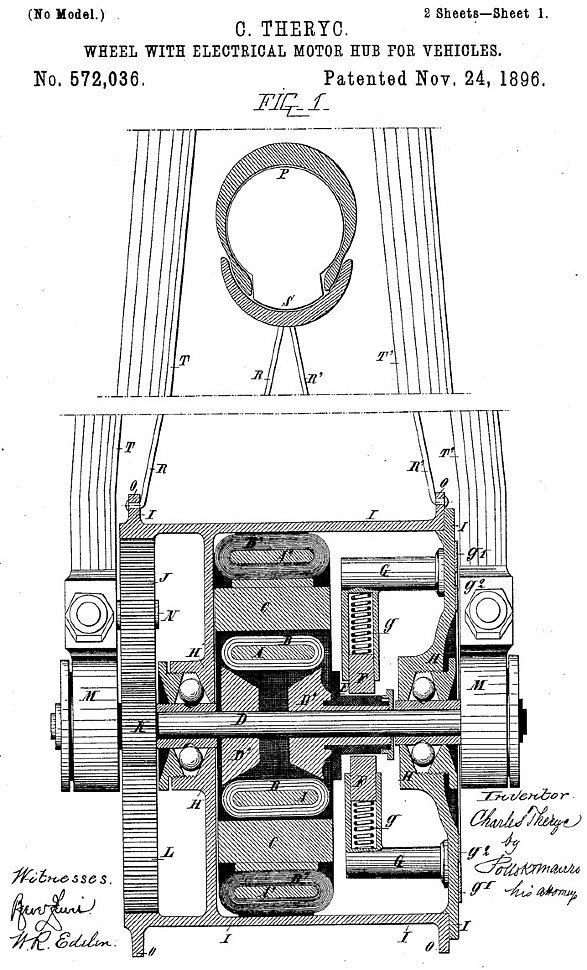
Преимущества мотор-колеса раскрыты в 1896 году в патенте француза Чарльза Терикома.
Фердинанд Порше с 1897 года в участвовал в разработке электрического мото-колеса (были мотор-колеса и на двигателях внутреннего сгорания, но это не наша тема). Опытный образец электромобиля получился удачным. Машина была компактной, быстрой — она могла передвигаться с неплохой для конца XIX века скоростью 40 километров в час, — но при этом тяжёлой. Значительную часть веса машины составляли ёмкие свинцовые аккумуляторные батареи. Их запас хода был невелик — от одной зарядки автомобиль мог проехать около часа. Самодвижущийся экипаж, получивший название Lohner-Porsche, имел два электромотора мощностью две с половиной лошадиных сил каждый. Механическая трансмиссия отсутствовала, а электромоторы располагались в ступицах передних колёс.
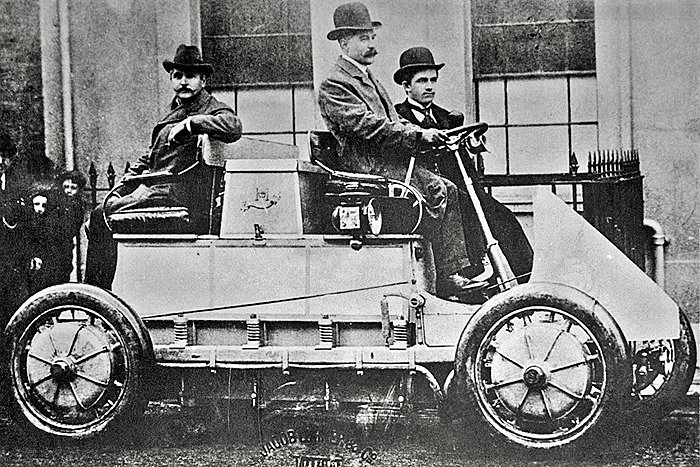 Lohner-Porsche
Lohner-Porsche
Машина не была чисто электромобилем, в ней стоял небольшой бензиновый двигатель, вращающий генератор. Генератор вырабатывал ток, который подзаряжал аккумулятор, а тот в свою очередь питал силовые электродвигатели. Таким образом это была первая демонстрация гибридной силовой установки, состоящей из двигателя внутреннего сгорания, аккумуляторов и электродвигателей. Это изобретение получило Гран-при Парижской всемирной выставки 1900 года. Фердинанд Порше считал этот проект до конца нереализованным. В последующие годы 300 Lohner Porsches были сделаны и проданы состоятельным покупателям.
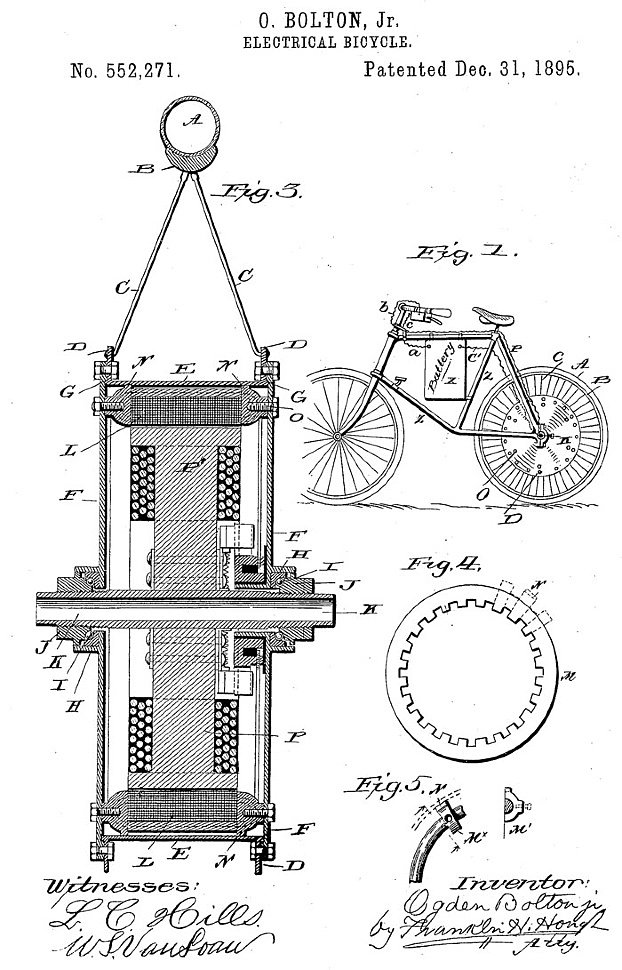
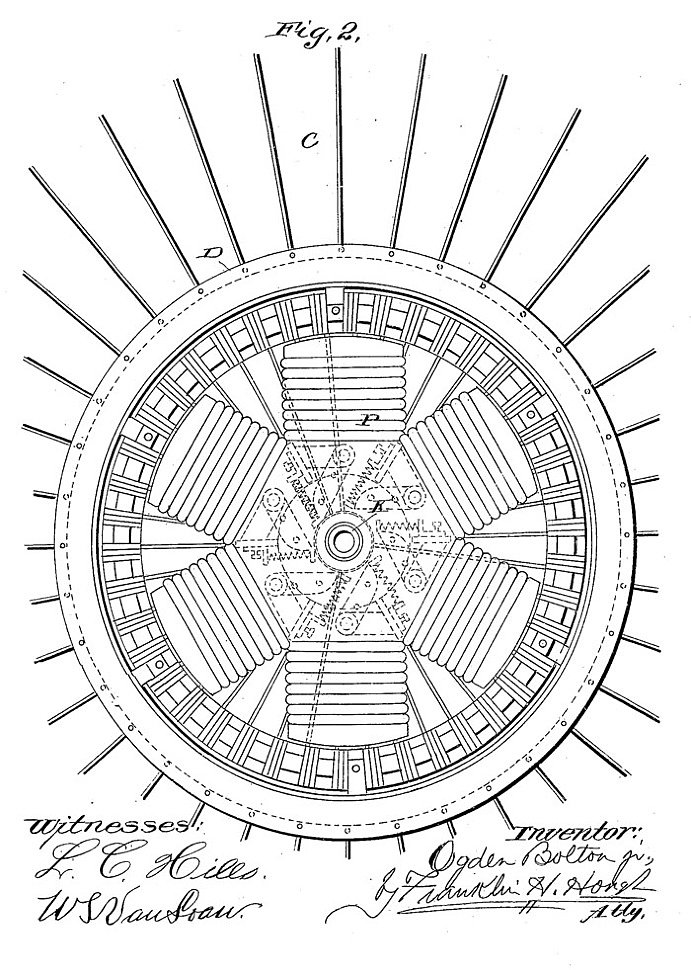
Первые электровелосипеды с мотор-колесами
С 1890 сразу несколькими патентами была защищена конструкция электрического привода, устанавливаемого на велосипеде. Так, патент США 1895 года Огдена Болтона описывает электровелосипед с питанием от батареи с мотор-втулкой, установленной на заднем колесе. Не было никаких передач, и двигатель мог потреблять до 100 ампер (A) от 10-вольтовой батареи.
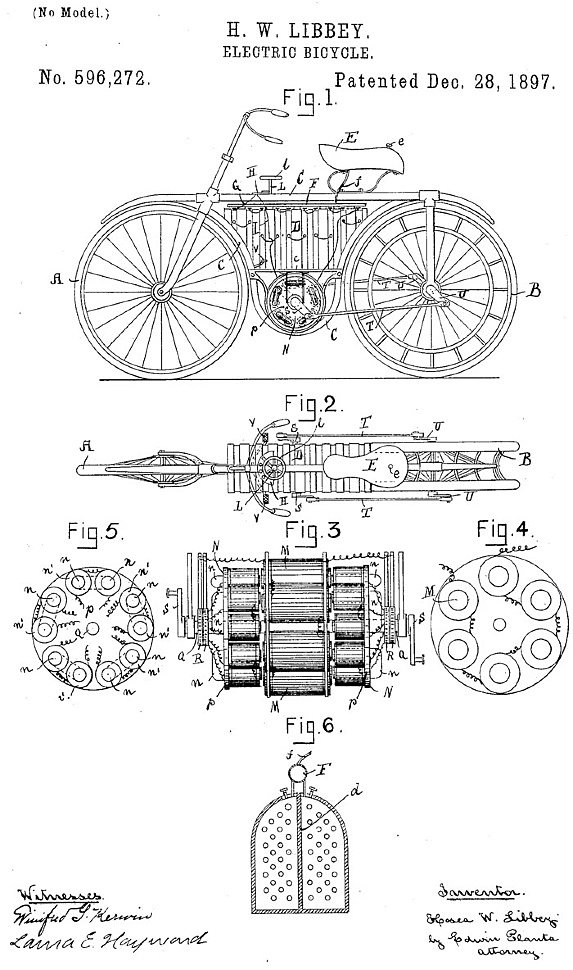
Два года спустя, в 1897 году, Осия У. Либби из Бостона изобрел электрический велосипед (патент США № 596272) приводимый в движение «двойным электродвигателем». В конце 1990-х годов эта модель была заново изобретена или имитирована и использована в электровелосипедах Giant Lafree.
В начале XX века история с использованием мотор-колес подзаглохла. Рост мощности бензинового двигателя превысил мощность мотор-колес, что компенсировало любые потери в трансмиссии. В результате автомобили перешли на бензиновые двигатели с трансмиссией.
В конце XX века с появлением относительно дешевых, емких и легких литий-ионных аккумуляторов мотор-колеса стали активно использоваться для электрификации велосипедов и мотоциклов.
Современный бесщеточный двигатель
В электровелосипедах и электросамокатах используются бесщеточные двигатели постоянного тока (BLDC). Они не используют щетки для изменения направления тока, протекающего к двигателю, как это делали старые электромоторы. Щетки делали двигатели менее эффективными и имели тенденцию со временем изнашиваться.
Как работает современный бесщеточный двигатель отлично проиллюстрировано в видеоролике:
https://youtube.com/watch?v=7N9CHEF2214
Принцип работы мотор-колеса
Прототип на базе микросхемы MC33035
Параллельно с разработкой контроллера на Ардуино я рассматривал альтернативные варианты логической части контроллера. И это привело меня к микросхеме MC33035. Это старая разработка от Motorola, сейчас её выпускает ON Semiconductor. Создана специально для мощных трёхфазных двигателей.
- Отвечает за всю логическую часть контроллера
- Считывает показания с датчиков Холла
- Определяет положения вала
- Выдаёт сигналы для затворов Н-моста на их драйверы
- Имеет возможность подключения индикатора ошибок, перегрева
- Обрабатывает и передает ШИМ-сигнал (PWM)
- Осуществляет реверс (обратный ход колеса)
Одним словом, микросхема содержит всё необходимое для управления электродвигателем. Её стоимость очень низкая: на Алиэкспрессе — около 50 рублей. Для сборки полноценного контроллера на её основе потребуется микросхема MC33035, полумостовые драйверы и Н-мост из полевых транзисторов. Я также собрал контроллер на этой микросхеме. Работает отлично, стабильно, колесо крутится как надо на различных оборотах. Но функционал микросхемы ограничен, если необходимо наворотить различные функции, вывод на дисплей скорости, одометр, расход батареи, то опять же возникает необходимость дополнительно подключить Ардуино или что-то аналогичное.
Главное преимущество контроллера на базе MC33035 — это простота в использовании. Просто покупаете микросхему, собираете Н-мост, спаиваете всё на плату с небольшой обвязкой — и контроллер готов. Если нужно просто запустить двигатель с ШИМ-сигналом и управлять им — оптимальный вариант.
Контроллер на базе Ардуино — вариант сложнее, понадобится писать логику, обеспечивать дополнительные защиты контроллера. Но для экспериментов, прототипов, дополнительного функционала, использования различных режимов работы двигателя — подходящий вариант. Поэтому я решил пока отложить MC33035 и продолжить работу с Ардуино.
Прототип на Ардуино
Под рукой у меня была Arduino UNO, и я решил собрать контроллер на её основе.
Первым делом я подал на датчики Холла питание 5 вольт от Ардуино (его достаточно для датчиков). Сигнальные провода от датчиков подключил на цифровые пины Ардуино, написав простейшую программу для считывания и обработки сигналов с датчиков.
//Пины ключей Н-мостов const int TRAplus = 8;const int TRAminus = 9;const int TRBplus = 10;const int TRBminus = 11;const int TRCplus = 12;const int TRCminus = 13;//датчики холлаconst int HallA = 3;const int HallB = 1;const int HallC = 0;boolean vala;boolean valb;boolean valc;boolean pvala;boolean pvalb;boolean pvalc;int pHall;int turns;void setup() { //Установка пинов ключей на выход pinMode(TRAplus, OUTPUT); pinMode(TRAminus, OUTPUT); pinMode(TRBplus, OUTPUT); pinMode(TRBminus, OUTPUT); pinMode(TRCplus, OUTPUT); pinMode(TRCminus, OUTPUT); //Вывод данных через серийный порт Serial.begin(9600); }void loop() { //Считываем датчики Холла и записываем их значение в val vala = digitalRead(HallA); valb = digitalRead(HallB); valc = digitalRead(HallC);//Счётчик оборотов колеса. Необходима доработка if(vala && !pvala) { if(pHall == HallC) // или HallB в обратную сторону turns++; pHall = HallA; } if(valb && !pvalb) { if(pHall == HallA) // или HallC в обратную сторону turns++; pHall = HallB; } if(valc && !pvalc) { if(pHall == HallB) // или HallA в обратную сторону turns++; pHall = HallC; } digitalWrite(TRAplus, (vala && !valb) ? HIGH : LOW); //если vala==HIGH и valb==LOW, тогда записать HIGH, иначе LOW digitalWrite(TRAminus, (valb && !vala) ? HIGH : LOW); digitalWrite(TRBplus, (valb && !valc) ? HIGH : LOW); digitalWrite(TRBminus, (valc && !valb) ? HIGH : LOW); digitalWrite(TRCplus, (valc && !vala) ? HIGH : LOW); digitalWrite(TRCminus, (vala && !valc) ? HIGH : LOW); pvala = vala; pvalb = valb; pvalc = valc; Serial.print(vala); Serial.print(valb); Serial.println(valc); //Serial.println(turns/3);}
Затем собрал Н-мост из полевых NPN-транзисторов. Подвёл к мосту независимое питание на 12 вольт. Но при отладке, чтоб убедиться в работоспособности, я подключил напрямую шесть пинов 5V из Ардуино на затворы H-моста. У большинства полевых транзисторов затвор работает на 20 вольт. Так делать нельзя, потому что Н-мост будет плохо работать и перегреваться. Но для кратковременных тестов это пойдёт. Кое-как, с сильными перегревами и страшными звуками, вибрациями и толчками колесо медленно закрутилось. Начало положено.
Электробайк. Контроллер двигателя своими руками +39
• makarenko • #288534 • Гиктаймс
•
•
16700
DIY или Сделай сам, Электроника для начинающих, Энергия и элементы питания, Блог компании Mail.Ru Group

Как вы уже знаете из прошлых постов, у нас в компании есть DIY-движение. В свободное от работы время коллеги занимаются фрезеровкой печатных плат в домашних условиях, делают тепловизор на FLIR Lepton, а также решают семейные разногласия с помощью 4 контроллеров и 2 умных часов. Продолжим серию увлекательный историй! Сегодня я расскажу, как сделать контроллер к трехфазному двигателю электровелосипеда своими руками. Целью создания такого контроллера было:
- Изучение работы трехфазного мотора под управлением контроллера.
- Большинство контроллеров для электровелосипедов, представленных на рынке, — китайские. Они хоть и относительно дешевые (около 2.000 руб в зависимости от мощности), но являются неведомой коробкой, в которой неизвестно что происходит. И сразу к ней возникает очень много вопросов — экономично ли она потребляет и распределяет ток, какой у нее запас мощности, почему так сильно перегревается, преждевременно срабатывает защита по току и т.д.
В тоже время на рынке представлены европейские качественные контроллеры для электробайков. Они оснащаются расширенными функциями, работают на разных напряжениях и токах и их можно программировать. Устанавливаются они на сверхмощные электровелосипеды. Но цена у них кусается — 10-20 тыс. рублей.
В итоге я решил пойти своим путем: разобраться в устройстве контроллера, сделать его прототип, а затем попытаться сделать контроллер качественнее китайского контроллера. На текущий момент проект у меня в разработке только и на уровне прототипа, готового варианта пока нет. Буду рад услышать ваши комментарии и советы.
Цикл работы
Чтобы привести в движение трёхфазный двигатель, нужно рассмотреть цикл его работы за электрический оборот. Итак, имеем три фазы — A, B, C. Каждая из фаз получает положительную и отрицательную полярности в определённый момент времени. Поочерёдно по шагам пропускается ток от «плюса» одной фазы к «минусу» другой фазы. В итоге получается шесть шагов = три фазы × две полярности.
A+, A–, B+, B–, C+, C–
Рассмотрим эти шесть шагов цикла. Предположим, что положение ротора установлено в точке первого шага, тогда с датчиков Холла мы получим код вида 101, где 1 — фаза А, 0 — фаза B, 1 — фаза С. Определив по коду положение вала, нужно подать ток на соответствующие фазы с заданными полярностями. В результате вал проворачивается, датчики считывают код нового положения вала — и т. д.
В таблице указаны коды датчиков и смена комбинаций фаз для большинства электродвигателей. Для обратного хода колеса (реверса) достаточно перевернуть знаки полярности фаз наоборот. Принцип работы двигателя довольно прост.
Цикл двигателя представлен в gif-анимации.
Схема контроллера электровелосипеда
Внутри корпуса контроллера находится плата с конденсаторами, транзисторами, токоизмерительными шунтами и управляющим микропроцессором. Также там располагаются преобразователи на 12В и 5В, которые обеспечивают подачу питания на микроконтроллер и периферию (ручки, датчик Холла).
Найти схемы отдельных моделей можно в интернете. Они подразделяются на электрические и принципиальные. Разобраться с обозначениями и расположением элементов сможет только человек с соответствующими знаниями.
При подключении устройства к электровелосипеду следует учитывать распиновку контроллера. Если мотор-колесо и управляющий агрегат приобретались в комплекте, то разъемы будут совпадать и проблем не возникнет. В противном случае необходимо установить соответствие цвета провода тому или иному компоненту байка.
Обычно красный и черный провод подаются на «+» и «-» аккумулятора соответственно. Толстые кабеля синего, зеленого и желтого цвета соединяются с трехфазным электродвигателем. Тонкие пять проводков идут к МК. Отдельно выделенный красный провод используется для «зажигания» – при его замыкании с плюсом аккумулятора происходит включение контроллера. Группа из черного, красного и зеленого цвета соответствует ручке акселератора. Для остальных проводов четкой схемы нет – все зависит от конкретной модели.
Ликбез: принцип работы бесколлекторного двигателя
В качестве иллюстрации я возьму очень распространённый двигатель с двенадцатью катушками в статоре и четырнадцатью магнитами в роторе. Вариантов намотки и количества катушек/магнитов довольно много, но суть всегда остаётся одной и той же. Вот фотография моего экземпляра с двух сторон, отлично видны и катушки, и магниты в роторе:
Чтобы было ещё понятнее, я нарисовал его схему, полюса магнитов ротора обозначены цветом, красный для северного и синий для южного:
На датчики холла пока не обращайте внимания, их всё равно нет
Что будет, если подать плюс на вывод V, а минус на вывод W (вывод U не подключаем ни к чему)? Очевидно, будет течь ток в катушках, намотанных зелёным проводом. Катушки намотаны в разном направлении, поэтому верхние две катушки будут притягиваться к магнитам 1 и 2, а нижние две к магнитам 8 и 9. Остальные катушки и магниты в такой конфигурации роли практически не играют, поэтому я выделил именно магниты 1,2,8 и 9. При такой запитке мотора он очевидно крутиться не будет, и будет иметь семь устойчивых положений ротора, равномерно распределённых по всей окружности (левая верхняя зелёная катушка статора может притягивать магниты 1, 3, 5, 7, 9, 11, 13).
Давайте записывать наши действия вот в такую табличку:
| Угол поворота ротора | U | V | W |
| 0° | n.c. | + | — |
А что будет, если теперь подать плюс на U и минус на W? Красные катушки притянут к себе магниты 3,4,10 и 11, таким образом чуть-чуть повернув ротор (я по-прежнему выделяю магниты, за которые ротор тянет):
Давайте посчитаем, на сколько повернётся ротор: между щелями магнитов 1-2 и 3-4 у нас 51.43° (=360°*2/7), а между соответствующими щелями в статоре 60° (=360°/12*2). Таким образом, ротор провернётся на 8.57°. Обновим нашу табличку:
| Угол поворота ротора | U | V | W |
| 8.57° | + | n.c. | — |
Теперь сам бог велел подать + на U и — на V!
| Угол поворота ротора | U | V | W |
| 17.14° | + | — | n.c. |
Теперь опять пора выровнять магниты с зелёными катушками, поэтому подаём напряжение на них, но красный и синий магниты поменялись местами, поэтому теперь нужно подать обратное напряжение:
| Угол поворота ротора | U | V | W |
| 25.71° | n.c. | — | + |
C оставшимися двумя конфигурациями всё ровно так же:
| Угол поворота ротора | U | V | W |
| 34.29° | — | n.c. | + |
| Угол поворота ротора | U | V | W |
| 42.85° | — | + | n.c. |
Если мы снова повторим самый первый шаг, то наш ротор провернётся ровно на одну седьмую оборота. Итак, всего у нашего мотора три вывода, мы можем подать напряжение на два из них шестью разными способами 6 = 2*C 2 3, причём мы их все уже перебрали. Если подавать напряжение не хаотично, а в строгом порядке, который зависит от положения ротора, то двигатель будет вращаться.
Запишем ещё раз всю последовательность для нашего двигателя:
| Угол поворота ротора | U | V | W |
| 0° | n.c. | + | — |
| 8.57° | + | n.c. | — |
| 17.14° | + | — | n.c. |
| 25.71° | n.c. | — | + |
| 34.29° | — | n.c. | + |
| 42.86° | — | + | n.c. |
Есть один нюанс: у обычного коллекторного двигателя за переключение обмоток отвечают щётки, а тут нам надо определять положение ротора самим.
Похожие записи:
 Обзор характеристик и цен на все популярные модели мини тракторов (видео)
Обзор характеристик и цен на все популярные модели мини тракторов (видео)
 Как из спирта сделать водку? + 10 ценных советов и видео
Как из спирта сделать водку? + 10 ценных советов и видео
 Самодельное ружье для подводной охоты: как сделать ружье для подводной охоты своими руками: конструкция самодельного подводного ружья
Самодельное ружье для подводной охоты: как сделать ружье для подводной охоты своими руками: конструкция самодельного подводного ружья
 Маятник ньютона своими руками
Маятник ньютона своими руками
 Фильтр для воды своими руками: как отфильтровать воду с помощью песка, угля, гравия и клочков одежды
Фильтр для воды своими руками: как отфильтровать воду с помощью песка, угля, гравия и клочков одежды
 Делаем металлоискатель на золото своими руками: схемы и пошаговая инструкция
Делаем металлоискатель на золото своими руками: схемы и пошаговая инструкция