Содержание
Причины и области применения ШИМ
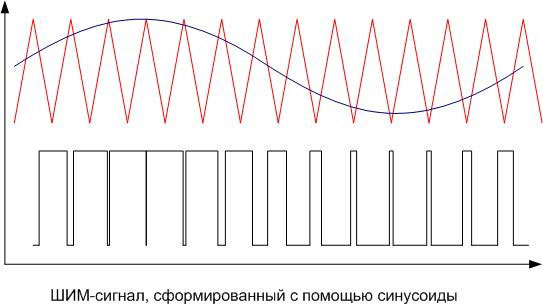
Принцип широтно-импульсной модуляции используется в регуляторах частоты вращения мощных асинхронных двигателей. В этом случае модулирующий сигнал регулируемой частоты (однофазный или трехфазный) формируется маломощным генератором синусоиды и накладывается на несущую аналоговым способом. На выходе получается ШИМ-сигнал, который подается на ключи потребной мощности. Дальше можно пропустить получившуюся последовательность импульсов через фильтр низкой частоты, например через простую RC-цепочку, и выделить исходную синусоиду. Или можно обойтись без нее – фильтрация произойдет естественным образом за счёт инерции двигателя. Очевидно, что чем выше частота несущей, тем больше форма выходного сигнала близка к исходной синусоиде.
Возникает естественный вопрос – а почему нельзя усилить сигнал генератора сразу, например, применением мощных транзисторов? Потому что регулирующий элемент, работающий в линейном режиме, будет перераспределять мощность между нагрузкой и ключом. При этом на ключевом элементе впустую рассеивается значительная мощность. Если же мощный регулирующий элемент работает в ключевом режиме (тринистор, симистор, RGBT-транзистор), то мощность распределяется во времени. Потери будут намного ниже, а КПД – намного выше.
В цифровой технике особой альтернативы широтно-импульсному регулированию нет. Амплитуда сигнала там постоянна, менять напряжение и ток можно лишь промодулировав несущую по ширине импульса и впоследствии усреднив её. Поэтому ШИМ применяют для регулирования напряжения и тока на тех объектах, которые могут усреднять импульсный сигнал. Усреднение происходит разными способами:
- За счет инерции нагрузки. Так, тепловая инерция термоэлектронагревателей и ламп накаливания позволяет объектам регулирования заметно не остывать в паузах между импульсами.
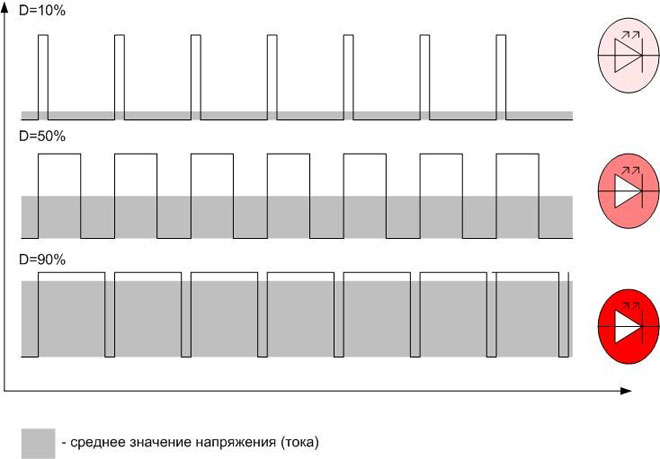
- За счёт инерции восприятия. Светодиод успевает погаснуть от импульса к импульсу, но человеческий глаз этого не замечает и воспринимает как постоянное свечение с различной интенсивностью. На этом принципе построено управление яркостью точек LED-мониторов. Но незаметное мигание с частотой несколько сот герц все же присутствует и служит причиной усталости глаз.
- За счет механической инерции. Это свойство используется при управлении коллекторными двигателями постоянного тока. При правильно выбранной частоте регулирования двигатель не успевает затормозиться в бестоковых паузах.
Поэтому ШИМ применяют там, где решающую роль играет среднее значение напряжения или тока. Кроме упомянутых распространенных случаев, методом PWM регулируют средний ток в сварочных аппаратах и зарядных устройствах для аккумуляторных батарей и т.д.
Если естественное усреднение невозможно, во многих случаях эту роль на себя может взять уже упомянутый фильтр низкой частоты (ФНЧ) в виде RC-цепочки. Для практических целей этого достаточно, но надо понимать, что без искажений выделить исходный сигнал из ШИМ с помощью ФНЧ невозможно. Ведь спектр PWM содержит бесконечно большое количество гармоник, которые неизбежно попадут в полосу пропускания фильтра. Поэтому не стоит строить иллюзий по поводу формы восстановленной синусоиды.
Очень эффективно и эффектно управление методом ШИМ RGB-светодиодом. Этот прибор имеет три p-n перехода – красный, синий, зеленый. Изменяя раздельно яркость свечения каждого канала, можно получить практически любой цвет свечения LED (за исключением чистого белого). Возможности по созданию световых эффектов с помощью PWM безграничны.
Наиболее употребительная сфера применения цифрового сигнала, промодулированного по длительности импульса – регулирование среднего тока или напряжения, протекающего через нагрузку. Но возможно и нестандартное использование этого вида модуляции. Все зависит от фантазии разработчика.
Что такое импульсный блок питания и где применяется
Что такое аттенюатор, принцип его работы и где применяется
Что такое частотный преобразователь, основные виды и какой принцип работы
Преобразователи напряжения с 12 на 220 вольт
Что такое диодный мост, принцип его работы и схема подключения
Что такое триггер, для чего он нужен, их классификация и принцип работы
Описание 4 схем регуляторов оборотов электродвигателя
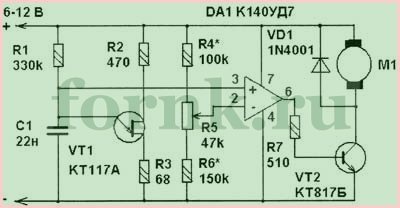
Первая схема
На транзисторе VT1 (однопереходном) реализован генератор пилообразного напряжения (частота 150 Гц). Операционный усилитель DA1 играет роль компаратора, создающего ШИМ на базе транзистора VT2. В результате получается ШИМ регулятор оборотов двигателя.
Регулятор скорости вращения двигателя
ШИМ: 0%-99%, напряжение: 5…16 В, ток: 10A….
Регулятор оборотов коллекторного двигателя
Мощность: 400 Вт, обороты: 90-1400 об/мин, 220В/50Гц…
Изменяют скорость вращения переменным резистором R5, который меняет длительность импульсов. Так как, амплитуда ШИМ импульсов постоянна и равна напряжению питания электродвигателя, то он никогда не останавливается даже при очень малой скорости вращения.
Вторая схема
Она схожа с предыдущей, но в роли задающего генератора применен операционный усилитель DA1 (К140УД7).
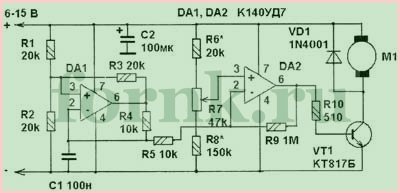
Этот ОУ функционирует как генератор напряжения вырабатывающий импульсы треугольной формы и имеющий частоту 500 Гц. Переменным резистором R7 выставляют частоту вращения электродвигателя.
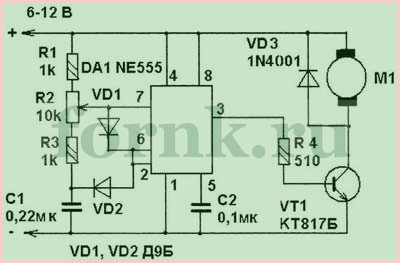
Третья схема
Она своеобразная, построена на она на популярном таймере NE555. Задающий генератор действует с частотой 500 Гц. Ширина импульсов, а следовательно, и частоту вращения двигателя возможно изменять от 2 % до 98 %.
Слабым местом во всех вышеприведенных схемах является, то что в них нет элемента стабилизации частоты вращения при увеличении или уменьшении нагрузки на валу двигателя постоянного тока. Разрешить эту проблему можно с помощью следующей схемы:
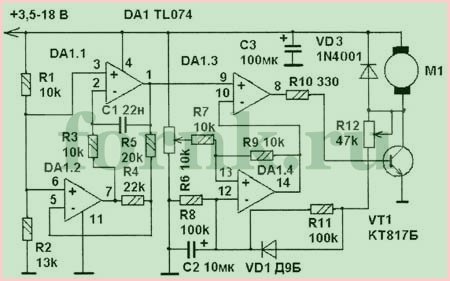
Как и большинство похожих регуляторов, схема этого регулятора имеет задающий генератор напряжения, вырабатывающий импульсы треугольной формы, частота которых 2 кГц. Вся специфика схемы — присутствие положительной обратной связи (ПОС) сквозь элементы R12,R11,VD1,C2, DA1.4, стабилизирующей частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
При налаживании схемы с определенным двигателем, сопротивлением R12 выбирают такую глубину ПОС, при которой еще не случаются автоколебания частоты вращения при изменении нагрузки.
Генератор с независимой регулировкой ширины и частоты импульсов
Texas Instruments LM555
Автоколебательный мультивибратор является популярным источником прямоугольных импульсов, полезным для многих приложений, таких как схемы синхронизации и звуковые извещатели. Один из наиболее распространенных способов генерации прямоугольных сигналов основан на использовании недорогого таймера 555. Иногда возникает необходимость в прямоугольных импульсах с фиксированной частотой, но переменной шириной импульса, или наоборот. Выполнить эти требования с помощью обычной автоколебательной схемы на основе 555 достаточно трудно. На Рисунке 1 показана модификация базовой схемы мультивибратора на таймере 555. Эту схему можно использовать для формирования стабильных импульсов, ширина и частота которых не зависят друг от друга и регулируются с помощью отдельных элементов управления. Выход 3 микросхемы таймера заряжает и разряжает конденсатор C1. Диоды D1 и D2 обеспечивают индивидуальные пути для зарядного и разрядного тока, соответственно. Два времязадающих потенциометра P1 и P2 управляют постоянной времени RC1 в течение циклов заряда и разряда.
|
|
|
| Рисунок 1. | Регулируя два потенциометра, можно независимо управлять шириной и частотой импульсов. |
При высоком уровне на выводе 3 микросхемы 555 конденсатор заряжается через R2 (часть P1, сопротивление которой зависит от положения движка потенциометра). Когда C1 заряжается до двух третей VCC, напряжение на выводе 3 опускается, и C1 разряжается через D2, P2 (сопротивление R1) и P1 (сопротивление R3). Когда напряжение на C1 достигает одной трети VCC, выходной уровень на выводе 3 вновь становится высоким. Процесс попеременного заряда и разряда С1 периодически повторяется, и результатом является выходной сигнал с требуемой шириной и частотой импульса. Поскольку прямое сопротивление диодов незначительно, ширина импульса равна
Период импульсов (величина, обратная частоте) равен
Таким образом, ширина импульса не зависит от положения движка потенциометра P2, а частота не зависит от положения движка потенциометра P1.
Назначение
Технически регулятор оборотов электродвигателя предназначен для изменения количества вращения вала за единицу времени. На этапе разгона корректировка частоты обеспечивает более плавную процедуру, меньшие токи и т.д. В некоторых технологических процессах необходимо регулятор оборотов снижает скорость движения оборудования, изменение подачи или нагнетания сырья и т.д.Однако на практике данная опция может преследовать и другие цели:
- Экономия затрат электроэнергии – позволяет снизить потери в моменты пуска и остановки вращений мотора, переключения скоростей или регулировки тяговых характеристик. Особенно актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы.
- Контроль температурного режима, величины давления без установки обратной связи с рабочим элементом или с таковой в асинхронных электродвигателях.
- Плавный пуск – предотвращает бросок тока в момент включения, особенно актуально для асинхронных моторов с большой нагрузкой на валу. Приводит к существенному сокращению токовых нагрузок на сеть и исключает ложные срабатывания защитной аппаратуры.
- Поддержание оборотов трехфазных электродвигателей на требуемой отметке. Актуально для точных технологических операций, где из-за колебаний питающего напряжения может нарушиться качество производства или на валу возникает разное усилие.
- Регулировка скорости оборотов электродвигателя от 0 до максимума или от другой базовой скорости.
- Обеспечения достаточного момента на низких частотах вращения электрической машины.
Возможность реализации тех или иных функций у регуляторов оборотов определяет как принцип их действия, так и схематическое исполнение.
ШИМ контроллер: принцип работы
ШИМ сигналом управляет ШИМ контроллер. Он управляет силовым ключом благодаря изменениям управляющих импульсов. В ключевом режиме транзистор может быть полностью открытым или полностью открытым. В закрытом состоянии через p-n-переход идет ток не больше нескольких мкА, то есть мощность рассеивания близка к нулю. В открытом состоянии идет большой ток, но так как сопротивление p-n-перехода мало, происходят небольшие теплопотери. Больше тепла выделяется в при переходе из одного состояния в другое. Однако благодаря быстроте переходного процесса в сравнении с частотой модуляции, мощность этих потерь незначительна.
Все это позволило разработать высокоэффективный компактный широтно импульсный преобразователь, то есть с малыми теплопотерями. Резонансные преобразователи с переключением в 0 тока ZCS позволяют свести теплопотери к минимуму.
Аналоговая ШИМ
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.
Цифровая ШИМ
Работая с цифровой информацией, микроконтроллер может формировать на выходах или 100% высокий или 0% низкий уровень напряжения. Но для эффективного управления нагрузкой такое напряжение на выходе нужно изменять. Например, когда осуществляется регулировка скорости вращения вала мотора или при изменении яркости светодиода.
Вопрос решают ШИМ контроллеры. То есть, 2-хуровневая импульсно-кодированная модуляция — это серия импульсов, характеризующаяся частотой 1/T и либо шириной Т, либо шириной 0. Для их усреднения применяется передискретизация. При цифровой ШИМ прямоугольные подимпульсы, которыми и заполнен период, могут занимать любое место в периоде. Тогда на среднем значении сигнала за период сказывается лишь их количество. Так как процесс осуществляется на частоте в сотни кГц, можно добиться плавной регулировки. ШИМ контроллеры решают эту задачу.
Можно провести следующую аналогию с механикой. Когда маховик вращается при помощи двигателя, при включенном двигателе маховик будет раскручиваться или продолжать вращение, если двигатель выключен, маховик будет тормозить из-за сил трения. Однако, если движок включать/выключать на несколько секунд, вращение маховика будет держаться на определенной скорости благодаря инерции. Чем дольше период включения двигателя, тем быстрее раскрутится маховик. Аналогично работает и ШИМ модулятор. Так работают ШИМ контроллеры, в которых переключения происходят в секунду тысячи раз, и частоты могут достигнуть единиц мегагерц.
Использование ШИМ-контроллеров обусловлено их следующими преимуществами:
- стабильностью работы;
- высокой эффективностью преобразования сигнала;
- экономией энергии;
- низкой стоимостью.
Получить на выводах микроконтроллера (МК) ШИМ сигнал можно:
- аппаратным способом;
- программным способом.
В каждом МК есть встроенный таймер, генерирующий ШИМ импульсы на определённых выводах. Это аппаратный способ. Получение ШИМ сигнала при помощи команд программирования более эффективно за счет разрешающей способности и дает возможность задействовать больше выводов. Но программный способ вызывает высокую загрузку МК, занимая много памяти.
Формирование ШИМ-сигналов
Создавать ШИМ-сигналы нужной формы достаточно трудно. Тем не менее индустрия сегодня может порадовать замечательными специальными микросхемами, известными как ШИМ-контроллеры. Они недорогие и целиком решают задачу формирования широтно-импульсного сигнала. Сориентироваться в устройстве подобных контроллеров и их использовании поможет ознакомление с их типичной конструкцией.
Стандартная схема контроллера ШИМ предполагает наличие следующих выходов:
Общий вывод (GND). Он реализуется в виде ножки, которая подключается к общему проводу схемы питания устройства.
Вывод питания (VC). Отвечает за электропитание схемы
Важно не спутать его с соседом с похожим названием – выводом VCC.
Вывод контроля питания (VCC). Как правило, чип контроллера ШИМ принимает на себя руководство силовыми транзисторами (биполярными либо полевыми)
В случае если напряжение на выходе снизится, транзисторы станут открываться лишь частично, а не целиком. Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой. Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.
Диагностика неисправностей
Одна из часто встречающихся проблем — пробой ключевых транзисторов. Результаты можно увидеть не только при попытке запуска устройства, но и при его обследовании с помощью мультиметра.
Кроме того, существуют и другие неисправности, которые несколько сложнее обнаружить. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:
- Контроллер глохнет после старта — обрыв петли ОС, перепад по току, проблемы с конденсатором на выходе фильтра (если таковой имеется), драйвером; возможно, разладилось управление ШИМ-контроллером. Надо осмотреть устройство на предмет сколов и деформаций, замерить показатели нагрузки и сравнить их с типовыми.
- ШИМ-контроллер не стартует — отсутствует одно из входных напряжений или устройство неисправно. Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.
- Напряжение на выходе отличается от номинального — проблемы с петлей ООС или с контроллером.
- После старта ШИМ на БП уходит в защиту при отсутствии КЗ на ключах — некорректная работа ШИМ или драйверов.
- Нестабильная работа платы, наличие странных звуков — обрыв петли ООС или цепочки RC, деградация емкости фильтра.
Мощный лабораторный генератор импульсов
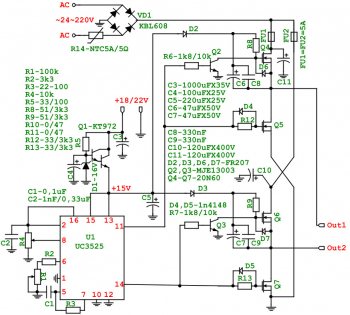
Схема 1 Генератор был спроектирован для использования в нем минимального количества общедоступных электронных компонентов, с хорошей повторяемостью и достаточной надежностью. Вариант генератора (схема 1) собран на базе широко распространенного шим-контроллера UC3525 (U1), который управляет мостовой схемой на полевых транзисторах Q4-Q7. Если нижние ключи каждого из полумостов, работающих в противофазе, управляются непосредственно выходами микросхемы 11/14 U2, то в качестве драйверов верхнего плеча применены бустрепные каскады на транзисторах Q2, Q3. Такие каскады широко используются в большинстве современных микросхемных драйверов и достаточно хорошо описаны в литературе, посвященной силовой электронике. Входное напряжение переменное или постоянное (
Необходимость установки
Обязательно используются контроллеры для схем, в которых присутствуют свинцово-кислотные АКБ. Это связано с тем, что такие элементы питания негативно воспринимают как перезаряд, так и значительное разряжение. В первом случае может произойти быстрый выход из строя батареи за счет закипания электролита или даже взрыва банок с ним. Во втором случае процесс приводит к разрушению пластин.
Нередко для импульсных источников питания или в источники бесперебойного питания встраивают PWM-элементы. Встречаются они и в инверторах.
Интегральный ШИМ-контроллер с токовым режимом управления в компактном корпусе TSOP-6
Обычно разъединение происходит при достижении двенадцативольтовым аккумулятором уровня 10,5 или 11 В. В таком случае за 10 часов непрерывной работы падение емкости составит со 100% до примерно 20%. В процессе более быстрого разряжения емкость будет уменьшаться.
В определенных условиях допускается коррекция напряжения отключения во время изготовления или настроечного процесса. Однако, на прилавках доминирует не регулятор напряжения, а прибор с типовым уровнем выходных параметров.
Ориентироваться по затратам поможет таблица:
| Блок | Период эксплуатации, лет | Стоимость (% от стоимости оборудования) |
| Солнечный потребитель | 25-30 | 20-30% |
| Контроллер заряда | 10 | 2-5% |
| АКБ | 2-6 | 45-60% |
| Дополнительное оборудование | более 10 | 10% |
Исходя из пропорций затрат, очевидно, что PWM-элементы не являются большой статьей затрат в схеме. При этом они играют важную роль в процессе обеспечения эффективности системы, продлевая срок службы остального оборудования.
Причины распространения
Чем привлекает автолюбителей ШИМ-регулятор? Следует отметить стремление к увеличению КПД, когда проводится построение вторичных источников питания для электронной аппаратуры. Благодаря данному свойству можно данную технологию найти также при изготовлении компьютерных мониторов, дисплеев в телефонах, ноутбуках, планшетах и подобной техники, а не только в автомобилях. Также следует отметить значительную дешевизну, которой отличается данная технология при своём использовании. Также, если решите не покупать, а собирать ШИМ-регулятор собственноручно, то можно сэкономить деньги при усовершенствовании своего собственного автомобиля.
ШИМ-регулятор: принцип действия и сфера применения
Сам принцип широтно–импульсного моделирования (ШИМ) известен уже давно, но применяться в различных схемах он стал относительно недавно. Он является ключевым моментом для работы многих устройств, используемых в различных сферах: источники бесперебойного питания различной мощности, частотные преобразователи, системы регулирования напряжения, тока или оборотов, лабораторные преобразователи частоты и т.д. Он прекрасно показал себя в автомобилестроении и на производстве в качестве элемента для управления работой как сервисных, так и мощных электродвигателей. ШИМ-регулятор хорошо зарекомендовал себя при работе в различных цепях.
Давайте рассмотрим несколько практических примеров, показывающих, как можно регулировать скорость вращения электродвигателя с помощью электронных схем, в состав которых входит ШИМ-регулятор. Предположим, что вам необходимо изменить обороты электродвигателя в системе отопления салона вашего автомобиля. Достаточно полезное усовершенствование, не правда ли? Особенно в межсезонье, когда хочется регулировать температуру в салоне плавно. Двигатель постоянного тока, установленный в этой системе, позволяет изменять обороты, но необходимо повлиять на его ЭДС. С помощью современных электронных элементов эту задачу легко выполнить. Для этого в цепь питания двигателя включается мощный полевой транзистор. Управляет им, как вы уже догадались, ШИМ- регулятор оборотов. С его помощью можно менять обороты электродвигателя в широких пределах. Каким образом работает ШИМ-регулятор в цепях переменного тока? В этом случае используется несколько иная схема регулирования, но принцип работы остается тем же. В качестве примера можно рассмотреть работу частотного преобразователя. Такие устройства широко применяются на производстве для регулирования скорости двигателей. Для начала трехфазное напряжение выпрямляется с помощью моста Ларионова и частично сглаживается. И только после этого подается на мощную двуполярную сборку или модуль на базе полевых транзисторов. Управляет же им ШИМ-регулятор напряжения, собранный на базе микроконтроллера. Он и формирует контрольные импульсы, их ширину и частоту, необходимую для формирования определенной скорости электродвигателя. К сожалению, помимо хороших эксплуатационных характеристик, в схемах, где используется ШИМ-регулятор обычно появляются сильные помехи в силовой цепи. Это связано с наличием индуктивности в обмотках электродвигателей и самой линии. Борются с этим самыми разнообразными схемными решениями: устанавливают мощные сетевые фильтры в цепях переменного тока или ставят обратный диод параллельно двигателю в цепях постоянного электропитания.
Такие схемы отличаются достаточно высокой надежностью в работе и являются инновационными в сфере управления электроприводами различной мощности. Они достаточно компактны и хорошо управляемы. Последние модификации таких устройств широко применяются на производстве.
Системы управления микросхемами
Важно знать не только из чего состоят микросхемы шим — контроллеров, но и какие существуют виды самих систем. В настоящее время доступно две основных системы широко — импульсной модуляции в которых шим — контроль принимает активное участие
Вот их некоторые особенности:
Цифровая система. В цифровой шим — системе все существующие процессы описываются цифровыми данными. Так на выходе в цифровом формате формируется показатель уровня напряжения. Заметим, что уровень напряжения может быть высокий (измеряется как 100%) и низкий (0%). Однако показатели напряжения, благодаря современным технологиям, можно изменять
Как? Необходимо изменить скважность импульсов. Только тогда изменится и напряжение
Любые совершенные перемены имеют свою частоту. Именно шим — контролёры регулируют описанные процессы. С их помощью вся система будет успешно работать. Эта специальная микросхема по праву называется сердцем всей цифровой системы шим — модуляторов.
А вот получить на выходе нужный сигнал можно как с программным, так и аппаратным методом.
Аппаратный метод. Получение сигнала этим способом происходит с помощью специального таймера, который изначально встроен в цифровую систему. Такой таймер генерирует или способствует включению импульсов на определённых этапах вывода сигнала.
Программный метод. В этом случае получения сигналов происходит посредством выполнения специальных программных команд. У программного способа больше возможностей, нежели у аппаратного. В то же время использования этого метода получения сигналов может занять много памяти.
А что можно сказать о «сердце системы». У шима — контролёра, который активно применяется в цифровых модуляторах есть свои преимущества. Стоит помнить о следующих:
- Низкая стоимость.
- Стабильная работа.
- Высокая надёжность.
- Возможность экономить энергию.
- высокая эффективность преобразования сигналов.
Все перечисленные преимущества делают цифровую систему более востребованной среди потребителей.
Аналоговый модулятор. Принцип работы аналогового модулятора в корне отличается от принципа работы цифрового Вся суть работы такого модулятора состоит в сравнении двух сигналов. Эти сигналы отличаются между собой порядком частоты. Операционный усилитель — это главный элемент аналогового модулятора, который отвечает за сравнение сигналов. Сравнение сигналов осуществляется на выходе. В качестве сравнения усилитель используется два сигнала. Первый — пилообразное напряжение высокой частоты. Второй сигнал — низкочастотное напряжение. После сравнения на свет появляются импульсы прямоугольной формы. Длительность импульсов напрямую зависят от модулирующего сигнала.
Шим — контроллер в импульсных блоках питания
Многие электрические приборы сегодня оснащены специальными блоками питания. Эти блоки помогают преобразить один вид напряжения в другой. В процессе преобразования энергии принимают участия два устройства:
- Импульсный блок питания.
- аналоговые трансформаторные устройства.
В этой статье мы больше внимания обратим на первое устройство, так как именно в нём используется шим — контролёр.
Похожие записи:
 С чего начать поиски и как найти воду на участке для скважины
С чего начать поиски и как найти воду на участке для скважины
 Упражнения с гантелями для мужчин и женщин
Упражнения с гантелями для мужчин и женщин
 Как сделать юбку из старых джинсов своими руками
Как сделать юбку из старых джинсов своими руками
 Как сделать станок для производства блоков?
Как сделать станок для производства блоков?
 Как подключить старый телевизор к приставке цифрового телевидения
Как подключить старый телевизор к приставке цифрового телевидения
 Пакеты из крафтовой бумаги: схемы, развертки с размерами
Пакеты из крафтовой бумаги: схемы, развертки с размерами