Содержание
Регулировка оборотов двигателя
Рассмотрим на примере коллекторного мотора, так как он наиболее часто применяется на стиральных машинах.
Регулировка оборотов двигателя – важно, потому что с помощью него можно будет приспособить деталь отработавшей помощницы. Чтобы регулировать обороты мотора, его нужно правильно подключить
Чтобы сделать это, необходимо подсоединить несколько выходов. В первую очередь требуется взять двигатель от стиральной машинки, после следует заметить катушку, от которой идет несколько проводов, обычно 2-3. Теперь нам требуется выбрать 2 кабеля с наибольшим сопротивлением, для этого пригодится мультиметр
Чтобы регулировать обороты мотора, его нужно правильно подключить. Чтобы сделать это, необходимо подсоединить несколько выходов. В первую очередь требуется взять двигатель от стиральной машинки, после следует заметить катушку, от которой идет несколько проводов, обычно 2-3. Теперь нам требуется выбрать 2 кабеля с наибольшим сопротивлением, для этого пригодится мультиметр.
Следом требуется обнаружить коллектор мотора и щетки, от которых идут по 2 кабеля. После чего нужно найти выходы таходатчика. Лучше всего это сделать визуально. Провода от датчика легко видны. Они как правило красного цвета и самые тонкие.
Мнение эксперта
Работаю в сфере ремонта бытовой техники. Большой опыт в восстановлении стиральных и посудомоечных машин.
Задать вопрос
Щётки тоже хорошо видны. Нужно отследить провода до клеммной коробки. Иногда они уходят вглубь корпуса. В этом случае с помощью тестера прозваниваем все контакты до щёток.

элементы коллекторного мотора
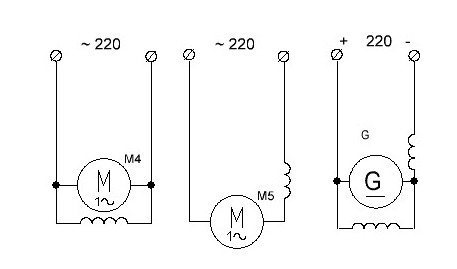
Теперь берем один кабель, идущий от коллектора, и присоединяем с одним из электропроводов катушки. Второй от коллектора и катушки подключаем к сети 220 вольт через нагревательный элемент. Если запуск был успешно и движок постепенно набрал обороты без рывков и заеданий, то можно подключить движок стиральной машины через регулятор.
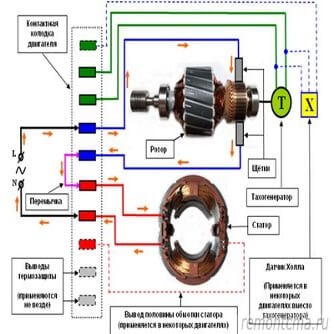
Схема подключения коллекторного мотора
Виды двигателей и принцип работы
Двигатели делятся на три типа: коллекторный, асинхронный и бесколлекторный. В большинстве электроинструментов стоит первый тип. Этот электродвигатель имеет довольно компактный размер. Его мощность значительно выше, чем у асинхронного, а цена довольно низкая. Что касается асинхронных, то этот тип в основном используется в металлообрабатывающей отрасли, а также широкое распространение они получили в угледобывающих шахтах. Довольно редко их можно встретить в быту.
Бесколлекторный электродвигатель используется там, где нужны большие обороты, точное позиционирование и малые размеры. Например, в различной медицинской технике, авиамоделировании. Принцип работы довольно прост. Если рамку прямоугольной формы, которая имеет ось вращения, поместить между плюсами постоянного магнита, то она начнет вращаться. Направление зависит от направления тока в рамке. В составе этого типа присутствуют якорь и статор. Якорь вращается, а статор стоит неподвижно. Как правило, на якоре стоит не одна рамка, а 4,5 или более.
Асинхронный двигатель работает по другому принципу. Благодаря эффекту переменного магнитного поля в статорных катушках он приводится во вращение. Если углубиться в курс физики, то можно вспомнить, что вокруг проводника, через который проходит ток, создается своеобразное магнитное поле, заставляющее вращаться ротор.

На рисунке отчетливо видно, что для перемещения ротора нужно выполнить необходимую коммутацию, но и регулировать обороты не представляется возможным. Тем не менее бесколлекторный двигатель может очень быстро набирать обороты.
Виды и критерии выбора
Для выбора регулятора нужно руководствоваться определенными характеристиками для конкретного случая. Среди всех критериев можно выбрать следующие:
- По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
- Мощность является основным параметром, от которого нужно отталкиваться.
- По диапазону U.
- По диапазону частот. Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая.
- Прочие характеристики, в которые включены гарантия, габариты, комплектация.
Устройство на тиристорах
В этой модели, представленной на схеме 1, применяются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить одним симистором.
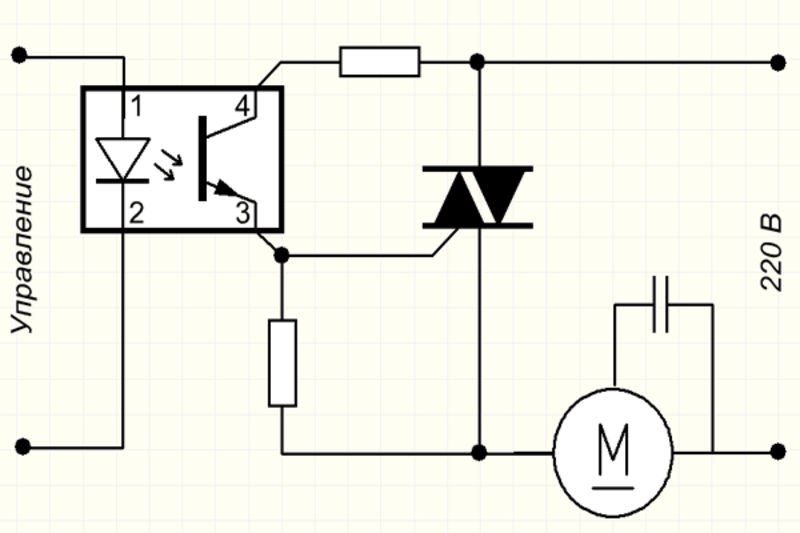
Схема 1 — Тиристорная регулировка оборотов коллекторного двигателя без потери мощности.
Эта схема производит регулирование с помощью открытия или закрытия тиристоров (симистора) при фазовом переходе через нейтраль. Для корректного управления коллекторным двигателем применяют следующие способы модификации схемы 1:
- Установка защитных LRC-цепей, состоящих из конденсаторов, резисторов и дросселей.
- Добавление на входе емкости.
- Использование тиристоров или симистора, ток которых превышает номинальное значение силы тока двигателя в диапазоне от 3..8 раз.
Этот тип регуляторов имеет достоинства и недостатки. К первым относятся низкая стоимость, маленький вес и габариты. Ко вторым следует отнести следующие:
- применение для моторов небольшой мощности;
- происходит шум и рывки мотора;
- при использовании схемы на симисторах происходит попадание постоянного U на двигатель.
Этот тип регулятора ставится в вентиляторы, кондиционеры, стиральные машины и электродрели . Отлично выполняет свои функции, несмотря на недостатки.
Транзисторный тип
Еще одним названием регулятора транзисторного типа является автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет номинал U по принципу широтно-импульсной модуляции (ШИМ) при помощи выходного каскада, в котором применяются транзисторы типа IGBT.
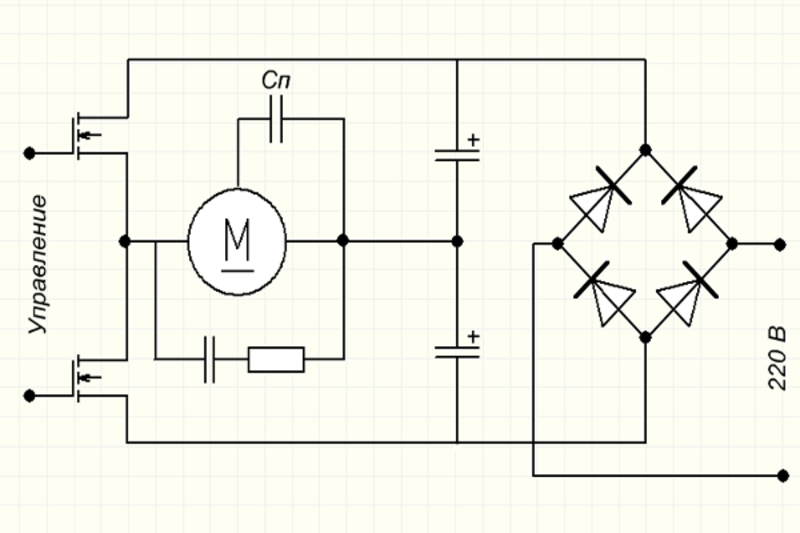
Схема 2 — Транзисторный ШИМ-регулятор оборотов.
Коммутация транзисторов происходит с высокой частотой и благодаря этому можно изменить ширину импульсов. Следовательно, при этом изменится и значение U. Чем длиннее импульс и короче паузы, тем выше значение U и наоборот. Положительные аспекты применения этой разновидности следующие:
- Незначительный вес прибора при низких габаритах.
- Довольно низкая стоимость.
- При низких оборотах отсутствие шума.
- Управление за счет низких значений U (0..12 В).
Основной недостаток применения заключается в том, что расстояние до электромотора должно быть не более 4 метров.
Регулирование за счет частоты
 Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
- Специализированные однофазные.
- Трехфазные без конденсатора.
Для регулирования оборотов используется конденсатор, включенный с обмотками однофазного двигателя (схема 3). Этот преобразователь частоты (ПЧ) имеет емкостное R, которое зависит от частоты протекающего переменного тока. Выходной каскад такого ПЧ выполнен на IGBT-транзисторах.
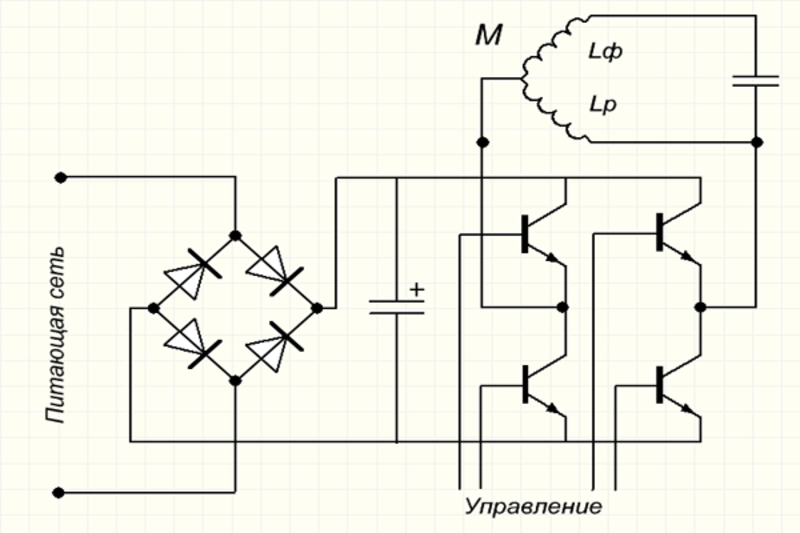
Схема 3 — Частотный регулятор оборотов.
У специализированного ПЧ есть свои преимущества и недостатки. Преимуществами являются следующие:
- Управление АД без участия человека.
- Стабильность.
- Дополнительные возможности.
Существует возможность управлять работой электромотора при определенных условиях, а также защита от перегрузок и токов КЗ. Кроме того, возможно расширять функционал при помощи подключения цифровых датчиков, мониторинга параметров работы и использования PID-регулятора. К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
Для трехфазных АД применяются также устройства регулирования частоты (схема 4). Регулятор имеет на выходе три фазы для подключения электромотора.
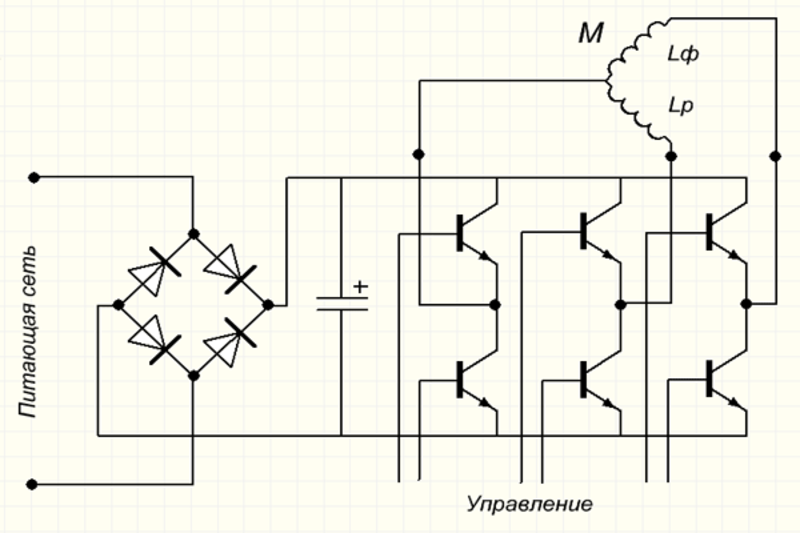
Схема 4 — ПЧ для трехфазного двигателя.
У этого варианта тоже есть свои сильные и слабые стороны. К первым можно отнести следующие: низкую стоимость, выбор мощности, широкий диапазон частотной регуляции, а также все преимущества однофазных преобразователей частоты. Среди всех отрицательных сторон можно выделить основные: предварительный подбор и нагрев при пуске.
Какие регуляторы бывают?
BEC и UBEC
Дополнительно к основной функции, регуляторы оборотов могут так же передавать питание к другим узлам дрона: полетному контроллеру, сервоприводам и так далее. Это достигается внедрением в регулятор блока исключения батареи — Battery Eliminator Circuit (далее как — BEC).
Использование BEC значительно упрощает конструкцию дрона, однако такая схема обладает рядом минусов. Блок исключения батареи может перегреваться при больших перепадах напряжения и больших нагрузках. К тому же регуляторы оборотов с BEC, как правило, стоят дороже, чем регуляторы без блока.
Согласитесь, логичнее и дешевле было бы сделать отдельно ESC и отдельно один BEC. Такое решение есть и называется оно универсальный блок исключения батареи (Universal Battery Eliminator Circuit, далее как — UBEC).
Преимущества UBEC

UBEC — подключается напрямую к аккумулятору и питает нужный узел дрона. Преимущества такого подхода весьма существенны:
- Регуляторы оборотов будут меньше перегреваться, поскольку из них будет исключен BEC
- UBEC обладают большим коэффициентом полезного действия
- Следовательно из предыдущих двух пунктов UBEC способен отдавать больший ток с меньшим риском
- Отсутствие переплаты за несколько лишних BEC, располагающихся в ESС. Для некоторых полетных контроллеров крайне не рекомендуется подключать больше одного ESC BEC
- Меньший вес регуляторов
Виды BEC и их преимущества
BEC бывают двух видов: линейные (LBEC) и импульсные (SBEC).

- Линейный преобразует энергию в тепло, а при перегреве отключается. Что может приводить к неприятным результатам: в лучшем случае коптер не сможет взлететь, а в худшем — неконтролируемое падение. В связи с чем стал применяться в сборке с сервоприводами, которые в свою очередь не потребляют много тока, не позволяя блоку перегреваться.
- Импульсный регулирует напряжение быстрым включением и выключением питания, такой подход исключил перегрев, повысил выходную мощность, и позволил достигать КПД 90%, а также импульсные BEC выигрывают у линейных в весе. Возникающие в цепи помехи, которые отрицательно сказываются на работе радио аппаратуры, исключаются добавлением LC — фильтра.

Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Читать также: Счетчик mercury 200 как снимать показания
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f — частота тока питающей сети, p — число пар полюсов). Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
В цепи якоря
Для осуществления этой схемы нужно цепь якоря подключить к источнику напряжения, которое можно менять.
Это возможно в электрических машинах малой или средней мощности. Двигатель большой мощности целесообразно подключить в схему с генератором напряжения независимого возбуждения.
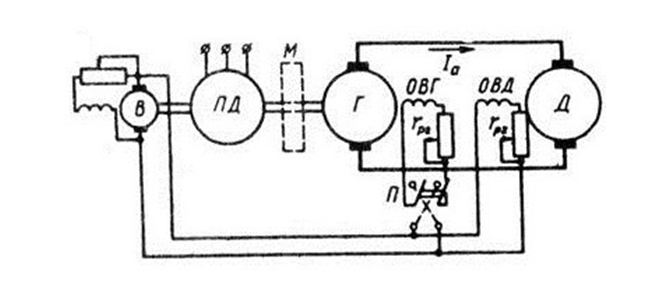
В качестве привода для генератора используют обычный трехфазный асинхронник. Чтобы уменьшить обороты, достаточно на якоре понизить напряжение. Оно меняется от номинального и вниз. Эта схема имеет название «двигатель-генератор». Таким образом можно менять параметры на двигателе 220в.
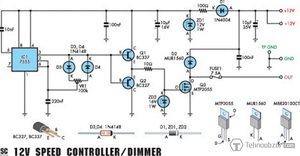
Для низкого напряжения
Управление агрегатами на 12в проще из-за более низкого напряжения и как следствие, более доступных деталей
Вариантов подобных схем множество, поэтому важно понять сам принцип
Такой двигатель имеет ротор, щеточный механизм и магниты. На выходе у него всего два провода, контролирование скорости идет по ним. Питание может быть 12, 24, 36в, или другое. Что нужно – это его менять. Лучше, когда в пределах от нуля до максимума. В более простых вариантах 12–0в не получится, другие варианты дают такую возможность.
Кто-то паяет радиоэлементы навесным монтажом, кто-то набирает печатную плату – это уже зависит от желания и возможностей каждого человека.
Этот вариант подойдет, если точность неважна: например, вентилятор. Напряжение меняется от 0 до 12 вольт, пропорционально меняется крутящий момент.
Другой вариант – со стабилизацией оборотов независимо от нагрузки на валу.
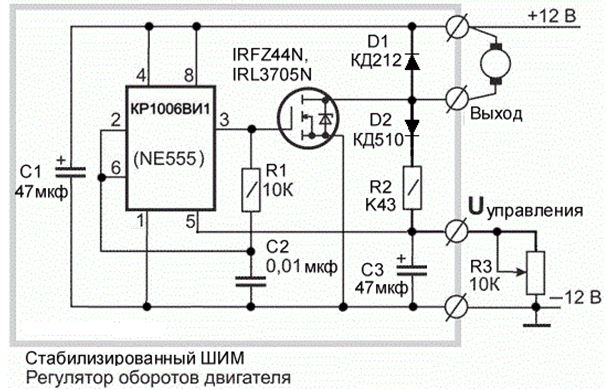
Питание 12 вольт, схема очень проста. Двигатель набирает обороты плавно, и также плавно их сбавляет так как напряжение на выходе меняется в пределах 12–0в. Как результат – можно убрать крутящий момент практически до нуля. Если потенциометр крутить в обратном направлении, мотор так же постепенно набирает обороты до максимума. Микросхема очень распространенная, ее характеристики тоже подробно описаны. Питание 12–18в.
Особенности конструкции
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
- Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
- Максимальная скорость вращения достигается 3200 об/мин. Эта характеристика зависит от типа двигателя. Схема может управлять моторами до 16 тыс. об/мин.
- Время разгона до максимальной скорости достигает 1 секунды.
- Нормальный разгон обеспечивается за 10 секунд от 800 до 1300 об/мин.
- На двигателе использован 8-полюсный тахогенератор с максимальным выходным напряжением на 6000 об/мин 30 В. То есть он должен выдавать 8мВ на 1 об/мин. При 15000 об/мин на нем должно быть напряжение 12 В.
- Для управления двигателем используется симистор на 15А и предельным напряжением 600 В.
Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс. На рисунке не указано.
Немного теории об устройстве и области применения коллекторных электродвигателей
Электродвигатели этого типа могут быть постоянного или переменного тока, с последовательным, параллельным или смешанным возбуждением ( для переменного тока применяется только первые два вида возбуждения).
Коллекторный электродвигатель состоит из ротора, статора, коллектора и щеток. Ток в цепи, проходящий через соединенные определенным образом обмотки статора и ротора, создает магнитное поле, заставляющее последний вращаться. Напряжение на ротор передается при помощи щеток из мягкого электропроводного материала, чаще всего это графит или медно-графитовая смесь. Если изменить направление тока в роторе или статоре, вал начнет вращаться в другую сторону, причем это всегда делается с выводами ротора, что бы не происходило перемагничивание сердечников.
При одновременном изменении подключения и ротора и статора реверсирования не произойдет. Существуют также трехфазные коллекторные электродвигатели, но это уже совсем другая история.
Электродвигатели постоянного тока с параллельным возбуждением
Обмотка возбуждения (статорная) в двигателе с параллельным возбуждением состоит из большого количества витков тонкого провода и включена параллельно ротору, сопротивление обмотки которого намного меньше. Поэтому для уменьшения тока во время запуска электродвигателей мощностью более 1 Квт в цепь ротора включают пусковой реостат. Управление оборотами электродвигателя при такой схеме включения производится путем изменения тока только в цепи статора, т.к. способ понижения напряжения на клеммах очень не экономичен и требует применение регулятора большой мощности.
Электродвигатели постоянного тока с последовательным возбуждением
Обмотка возбуждения такого электродвигателя имеет небольшое число витков толстого провода, и при ее последовательном включении в цепь якоря ток во всей цепи будет одинаков. Электродвигатели этого типа более выносливы при перегрузках и поэтому наиболее часто встречаются в бытовых устройствах.
- Подключением параллельно статору регулировочного устройства, изменяющего магнитный поток. Однако этот способ довольно сложен в реализации и не применяется в бытовых устройствах.
- Регулирование (снижение) оборотов с помощью уменьшения напряжения. Этот способ применяется практически во всех электрических устройствах – бытовых приборах, инструменте и т.д.
Эти однофазные моторы имеют меньший КПД, чем двигатели постоянного тока, но из за простоты изготовления и схем управления нашли наиболее широкое применение в бытовой технике и электроинструменте. Их можно назвать “универсальными”, т.к. они способны работать как при переменном, так и при постоянном токе. Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор — это часть вращения, статор — это внешний по типу магнит.
- Щётки, которые произведены из графита — это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор —это устройство, которое производит слежку за характеристикой вращения прибора. Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
- Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов. Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Схема регулятора оборотов коллекторного двигателя
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
- Для существенной экономии электроэнергии. Так, не любому механизму нужно много энергии для выполнения работы вращения мотора, в некоторых случаях можно уменьшить вращение на 20−30 процентов, что поможет значительно сократить расходы на электроэнергию сразу в несколько раз.
- Для защиты всех механизмов, а также электронных типов цепей. При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.
- Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.
- Для снижения уровня расходов на обслуживание устройств. С помощью таких регуляторов оборотов в двигателях 220 В можно значительно уменьшить возможность выхода из строя приборов, а также отдельных типов механизмов.
Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств. Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Устройство регулятора
В мире существует множество схем таких устройств. Тем не менее всех их можно разделить на 2 группы: стандартные и модифицированные изделия.
Стандартное устройство
Типичные изделия отличаются простотой в изготовлении идинистора, хорошей надёжностью при изменении оборотов двигателя. Как правило, такие модели основываются на тиристорных регуляторах. Принцип работы подобных схем достаточно прост:
Читать также: Как сделать флюгер своими руками из металла
- Заряд идёт на конденсатор.
- Через переменный резистор идёт напряжение пробоя Динистор.
- Далее он «пробивается».
- «Открывается » симистор, который отвечает за нагрузку.
- Чем выше будет напряжение, тем чаще будет «открываться симистор».
Таким образом, происходит регулировка оборотов коллекторного двигателя. В большинстве случаев подобную схему используют в зарубежных бытовых пылесосах. Однако следует знать, что такой регулятор оборотов не обладает обратной связью. Поэтому при изменении нагрузки придётся настраивать обороты электродвигателя.
Изменённые схемы
Конечно, стандартное устройство устраивает многих любителей регуляторов оборотов «покопаться» в электронике. Однако, без прогресса и улучшения изделий мы бы до сих пор жили в каменном веке. Поэтому постоянно изобретаются более интересные схемы, которые с удовольствием применяют многие производители.
Чаще всего используются реостатные и интегральные регуляторы. Как понятно из названия, первый вариант основан на реостатной схеме. Во втором же случае применяется интегральный таймер.
Реостатные отличаются эффективностью в смене количества оборотов коллекторного двигателя. Высокая эффективность обусловлена силовыми транзисторами, которые забирают часть напряжения. Таким образом, снижается поступление тока и двигатель работает с меньшим усердием.
Видео: устройство регулятора оборотов с поддержанием мощности
Главный недостаток такой схемы заключается в большом объёме выделяемого тепла. Поэтому для бесперебойной работы, регулятор должен постоянно охлаждаться. Притом охлаждение устройства должно быть интенсивным.
Иной подход реализован в интегральном регуляторе, где за нагрузку отвечает интегральный таймер. Как правило, в подобных схемах используются транзисторы практически любых наименований. Это связано с тем, что в составе имеется микросхема, обладающая большими значениями выходного тока.
Если нагрузка меньше 0,1 ампера, то всё напряжение поступает прямо на микросхему в обход транзисторов. Однако для эффективной работы регулятора необходимо, чтобы на затворе было напряжение 12В. Поэтому электроцепь и напряжение самого питания должно соответствовать этому диапазону.
Плата регулировки оборотов двигателя от стиральной машины
Часто случается так, что стиральные машины выходят из строя. Происходит это по множеству причин, но сейчас не об этом. В большинстве случаев, стиралки идут в утиль вместе со всеми узлами и деталями. Однако, не стоит торопиться.
Если барабан, корпус и другие мелкие детали практически никуда не приспособить, то двигатель можно установить много куда:
1.Самодельные точильные станки (карбороны);
2.Деревообрабатывающее оборудование;
4.И т.д., и т.п.
Практически весь электроинструмент строится на базе универсальных коллекторных двигателей, которые и устанавливаются в стиралки.
Правда, есть одна очень важная деталь – подключить двигатель стиральной машины напрямую к целевому прибору можно, но возникнет ряд проблем.
Проблемы использования двигателей стиралок
- Во-первых, он слишком оборотистый (не везде нужны 3000 оборотов в минуту).
- Во-вторых, даже если дать максимум, то значительно возрастут вибрации, а это дополнительные проблемы со станиной и т.п.
- В-третьих, зачастую плавное регулирование оборотов оказывается весьма полезным в работе конечного агрегата.
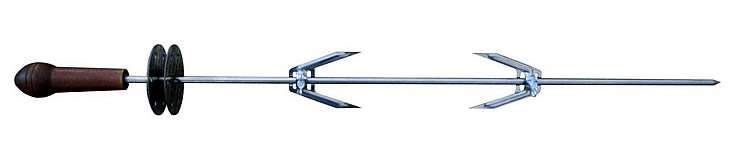
- В-четвертых, двигатели стиралок оснащаются таходатчиками (это элементы, конструктивно совмещенные с двигателем, они необходимы для контроля оборотов вала, скорость вращения пропорционально влияет на выходное напряжение таходатчика), что значительно усложняет процесс подключения и проектирования схемы управления.
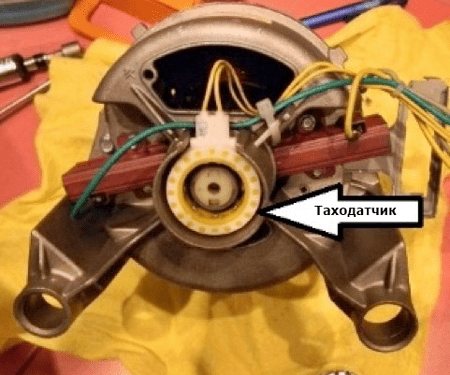
Рис. 1. Таходатчик
Встроенную плату из стиральной машины использовать с большой вероятностью не получится, поэтому логичным является вывод о необходимости покупки готовой платы.
Однако, после изучения стоимости готовых решений оказывается, что проще приобрести весь готовый прибор, чем «изобретать свой велосипед».
Поэтому многие выбирают самостоятельную сборку такой платы.
Регулировка оборотов двигателя стиральной машины своими руками
Простая регулировка напряжения на обмотках двигателя тоже сможет управлять оборотами, правда такой подход нежизнеспособен в реальных условиях, так как под нагрузкой на малых оборотах двигатель будет показывать малую мощность, а значит, его крутящий момент будет очень маленьким.
Правильный выход из данной ситуации – использование специальных контроллеров, которые будут управлять валом на основе данных с таходатчика.
Один из наиболее популярных подходов – схема на базе TDA1085 (этот микроконтроллер используется многими производителями бытовой техники для управления электродвигателями, в качестве аналога можно рассмотреть российскую микросхему КС1027ХА4).
Сама схема выглядит следующим образом.
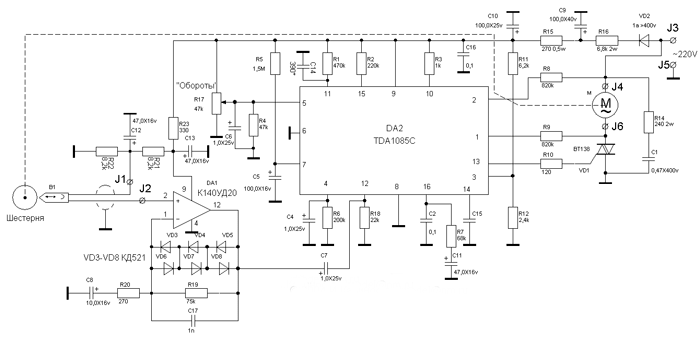
Рис. 2. Микросхема КС1027ХА4
Вариант печатной платы представлен ниже (вы можете спроектировать свой вариант).
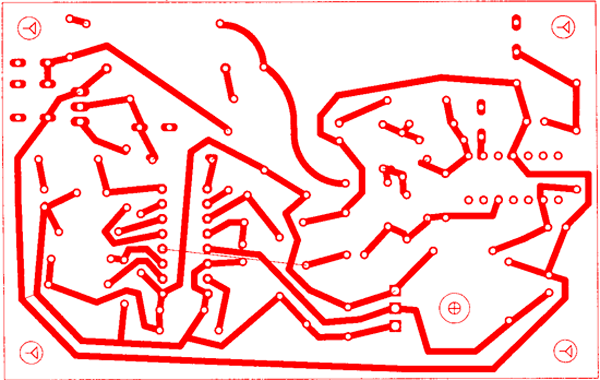
Рис. 3. Вариант печатной платы
За регулировку оборотов будет отвечать резистор R17.
Изменить диапазон частот вращения путем экспериментального подбора значения конденсатора C14.
Сам двигатель подключается к сети не напрямую, а через трансформатор мощностью более 200 Вт и выходным напряжением около 60 В (±10 В).
Если вам нужно прямое питание от сети 220 В, то можно рассмотреть применение следующей схемы.

Рис. 4. Схема для сети 220 В
Она построена на базе все той же TDA1085.
Схема регулирования оборотов коллекторных двигателей без микросхем
От 600 оборотов в минуту.
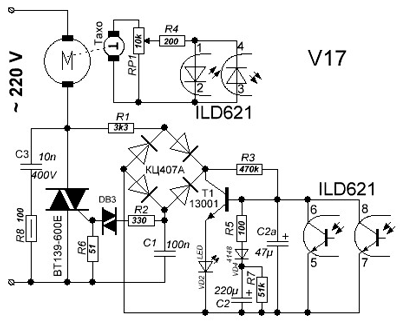
Рис. 5. Схема регулирования оборотов коллекторных двигателей без микросхем от 600 оборотов в минуту
Данная схема наиболее безопасна для пользователей, так как потенциометр отвязан от сети переменного тока.
Семистор необходимо смонтировать на теплоотводе.
Вариация исходной схемы с регулировкой от 200 оборотов в минуту.
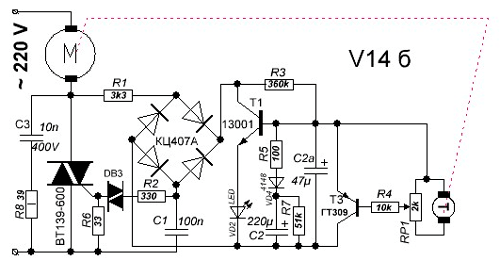
Рис. 6. Схема регулирования оборотов коллекторных двигателей без микросхем от 200 оборотов в минуту
К ее недостаткам следует отнести то, что потенциометр подключается к сети переменного тока, а значит, есть риск поражения током. Используйте модели с пластиковыми ручками регулировки!
Всегда сохраняется риск «разноса» двигателя, когда регулятор выходит из строя и вал начинает вращаться с максимальной скоростью. Поэтому предусмотрите быстрое аварийное отключение агрегата и укрепите каркас, в котором будет устанавливаться движок. На всякий случай.
Похожие записи:
 Как сделать автомобильный холодильник своими руками?
Как сделать автомобильный холодильник своими руками?
 Удлинитель на катушке своими руками. удлинитель на катушке с заземлением: как сделать своими руками самодельная катушка для электрической переноски
Удлинитель на катушке своими руками. удлинитель на катушке с заземлением: как сделать своими руками самодельная катушка для электрической переноски
 Обзор на фрезерные столы
Обзор на фрезерные столы
 Низкорослая газонная трава, не требующая стрижки
Низкорослая газонная трава, не требующая стрижки
 Самокрутящиеся шампуры
Самокрутящиеся шампуры
 Калибровочный станок по дереву
Калибровочный станок по дереву