Содержание
Конструктор мобильного клиента Simple WMS Client: способ создать полноценный ТСД без мобильной разработки. Теперь новая версия — Simple UI (обновлено 14.11.2019) Промо
Simple WMS Client – это визуальный конструктор мобильного клиента для терминала сбора данных(ТСД) или обычного телефона на Android. Приложение работает в онлайн режиме через интернет или WI-FI, постоянно общаясь с базой посредством http-запросов (вариант для 1С-клиента общается с 1С напрямую как обычный клиент). Можно создавать любые конфигурации мобильного клиента с помощью конструктора и обработчиков на языке 1С (НЕ мобильная платформа). Вся логика приложения и интеграции содержится в обработчиках на стороне 1С. Это очень простой способ создать и развернуть клиентскую часть для WMS системы или для любой другой конфигурации 1С (УТ, УПП, ERP, самописной) с минимумом программирования. Например, можно добавить в учетную систему адресное хранение, учет оборудования и любые другие задачи. Приложение умеет работать не только со штрих-кодами, но и с распознаванием голоса от Google. Это бесплатная и открытая система, не требующая обучения, с возможностью быстро получить результат.
5 стартмани
Критерии выбора 3D-сканера
Основной критерий – точность сканирования. Высокоточные устройства (10-30 мкм) помогут получить феноменальный результат: они способны передавать в 3D сложнейшую геометрию поверхности с минимальными погрешностями. Такие 3D-сканеры применяются в реверс-инжиниринге, контроле качества, медицине, служат для оцифровки пресс-форм, деталей устройств и пр. Наиболее востребованы на рынке 3D-сканеры точностью 30-100 мкм – они решают самые разнообразные задачи, в том числе не инженерные.

Портативные устройства линейки peel 3d – доступное 3D-сканирование на профессиональном уровне
Выбирая 3D-сканер, следует также учитывать разрешение (детализацию), т.е. степень дискретности, которая доступна при оцифровке объекта. Максимально высокая детализация позволяет отобразить в 3D-модели наиболее мелкие элементы.
Важное значение имеет и размер объектов и, соответственно, мобильность 3D-сканера. При оцифровке деталей и объектов небольших и средних параметров обычно используют ручные сканеры
Сканирование крупных объектов (сооружений, коммуникаций) выполняется с помощью стационарных лазерных устройств.
Изучая функциональные возможности 3D-сканеров, обратите внимание и на такие моменты, как условия использования, скорость сканирования, поверхность объекта сканирования, цветность.
Примите во внимание, что следующий этап после сканирования – получение и дальнейшая работа с CAD-моделью, и для этого вам потребуется специализированное программное обеспечение.
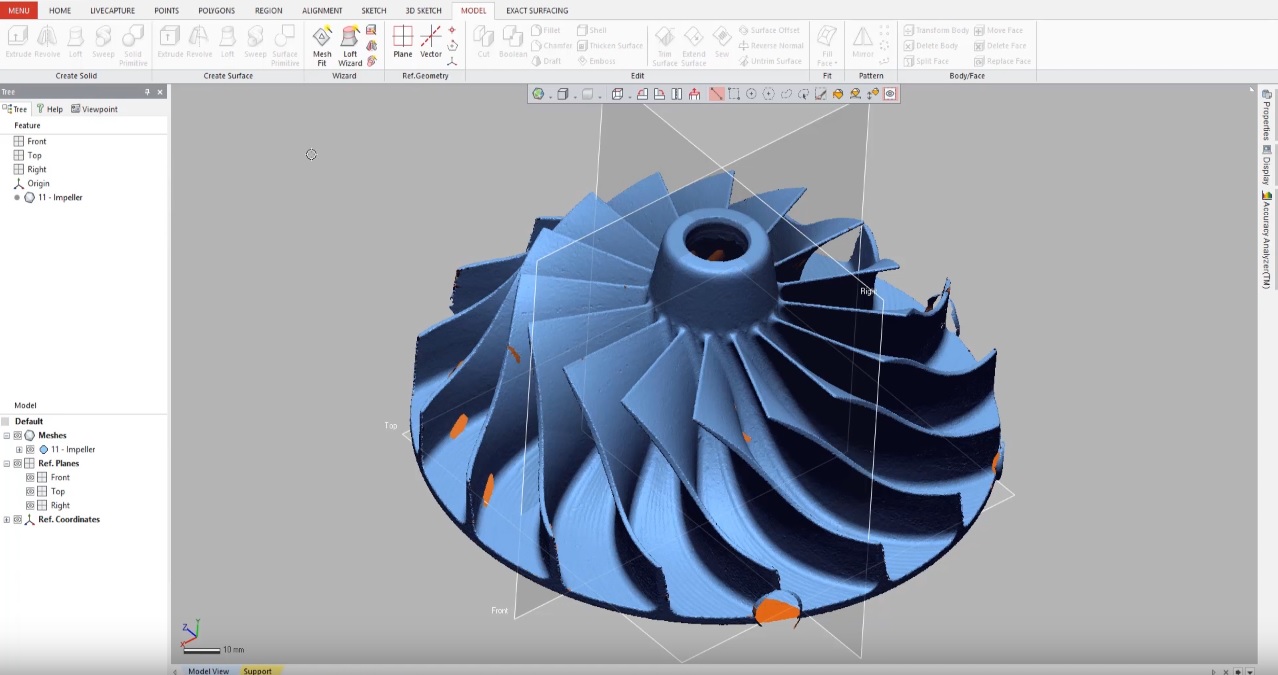
Обработка данных 3D-сканирования с целью реверс-инжиниринга в ПО Geomagic Design X
Цена на 3D сканирование
На рынке электроники представлен большой выбор трехмерных сканеров – от профессиональных до бытовых. Это весомое капиталовложение. 3D сканер должен соответствовать решению задач пользователя и бюджету.
Вот, что нужно знать, при заказе 3D сканирования:
- Каждый заказ рассчитывается индивидуально в зависимости от размера объекта, его геометрии и детализации;
- Минимальная ставка при трехмерном сканировании составляет – 3000 руб.;
- При выезде специалиста с оборудованием придется доплатить;
- Заранее оговаривается, какой моделью осуществляется сканирование.
Что входит в услугу:
- Ответ на любой вопрос, касающийся трехмерного сканирования;
- 3D сканирование;
- Создание единой 3D модели;
- Корректировка и наложение текстур;
- Модель сохраняется в нужном формате: OBJ, PLY, WRL, STL, AOP, ASCII, PTX, E57, XYZRGB, CSV, DXF, XML;
- Подготовка модели к 3D печати путем оптимизации.
За дополнительную стоимость:
- После проведения анализа предмета его делают пригодным для редактирования в CAD,SolidWorks, Компас и других программах. На выходе получается твердотельная модель.
- Обработка сканов, склейка, удаление шумов, сглаживание, оптимизация, регистрация сканов и другие дополнительные функции.
После ознакомления с технологией трехмерного сканирования прочитавший может сделать для себя вывод о том, для чего нужен 3D сканер. Цифровые технологии достигли своего пика и перешли в доступный режим. Приемлемая цена и легкость в использовании не заставят покупателя беспокоиться о переходе в цифровой мир.
Технология 3D сканирования считается одной из сложнейших. С каждым годом трехмерный тип анализа объектов развивается по следующим причинам:
- Действительно необходимое оборудование для промышленных предприятий.
- Незаменим в маркетинговой технологии. Хороший способ создать качественную рекламу и каталоги.
- Реалистичные копии пользуются популярность в медицине, кино.
Производством 3D сканеров занимаются как крупные компании, так и небольшие фирмы. А связано это с тем, что цифровое сканирование вышло на новый уровень и может повлиять на развитие многих сфер в индустрии.
Написание программы управления плоттером для Arduino и тестирование проекта
Перед началом написания программы необходимо удостовериться в том, подключены ли шаговые двигатели и работают ли они корректно.
Поскольку в нашем проекте мы используем шилд драйвера двигателей L293D нам необходимо скачать библиотеку AFmotor Library. Затем добавьте ее в каталог библиотек Arduino IDE. Переименуйте его в AFMotor. Если у вас открыта Arduino IDE, то закройте ее и снова откройте (то есть перезапустите), кликните на пункт меню file -> examples -> Adafruit Motor Shield Library -> stepper. Убедитесь в том, что вы выбрали правильный COM порт и плату Arduino и затем загрузите код этого примера в вашу плату Arduino. После этого на шаговом двигателе 1 вы должны наблюдать некоторые движения.
Для того чтобы протестировать работу шагового двигателя 2 измените порт двигателя с 2 на 1 в следующем фрагменте кода и снова загрузите код примера в плату Arduino.
Arduino
#include <AFMotor.h>
// Connect a stepper motor with 48 steps per revolution (7.5 degree)
// to motor port #2 (M3 and M4)
AF_Stepper motor(48, 2);
|
1 |
#include <AFMotor.h> AF_Steppermotor(48,2); |
Код программы для Arduino
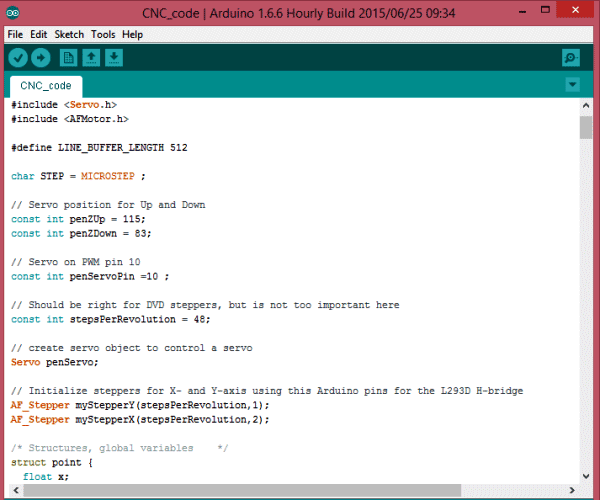
Теперь, когда вы убедились в том, что шаговые двигатели функционируют, скопируйте код Arduino для нашего плоттера (приведен в конце статьи, также его можно скачать по этой ссылке) и загрузите его в плату Arduino.
G-код (G-Code) для плоттера с ЧПУ
G-код представляет собой язык, на которым мы говорим машине с числовым программным управлением (ЧПУ) что она должна делать. В основном он содержит координаты X, Y и Z.
Пример этого кода:
Arduino
G17 G20 G90 G94 G54
G0 Z0.25X-0.5 Y0.
Z0.1
G01 Z0. F5.
G02 X0. Y0.5 I0.5 J0. F2.5
X0.5 Y0. I0. J-0.5
X0. Y-0.5 I-0.5 J0.
X-0.5 Y0. I0. J0.5
G01 Z0.1 F5.
G00 X0. Y0. Z0.25
|
1 |
G17G20G90G94G54 G0Z0.25X-0.5Y0. Z0.1 G01Z0.F5. G02X0.Y0.5I0.5J0.F2.5 X0.5Y0.I0.J-0.5 X0.Y-0.5I-0.5J0. X-0.5Y0.I0.J0.5 G01Z0.1F5. G00X0.Y0.Z0.25 |
Написание G-кода вручную даже для простых геометрических фигур достаточно утомительно, поэтому мы воспользуемся специальным программным обеспечением которое позволит нам генерировать G-код. В нашем проекте мы для этой цели использовали программное обеспечение «Inkscape», которое можно скачать по этой ссылке. Также вы можете скачивать уже готовые G-коды в интернете.
Программная среда Processing IDE для загрузки G-кода в Arduino
Программная среда с открытым исходным кодом Processing IDE поможет нам в загрузке G-кодов в плату Arduino. Для этого вам сначала необходимо скачать GCTRL.PDE file. После скачивания откройте этот файл в Processing IDE.
После этого нажмите “run” (запуск программы). На экране появится окно со всеми необходимыми инструкциями. Нажмите “p” на клавиатуре. Система попросит вас выбрать порт. Выберите порт, к которому подключена ваша плата Arduino. В нашем случае это порт 6.
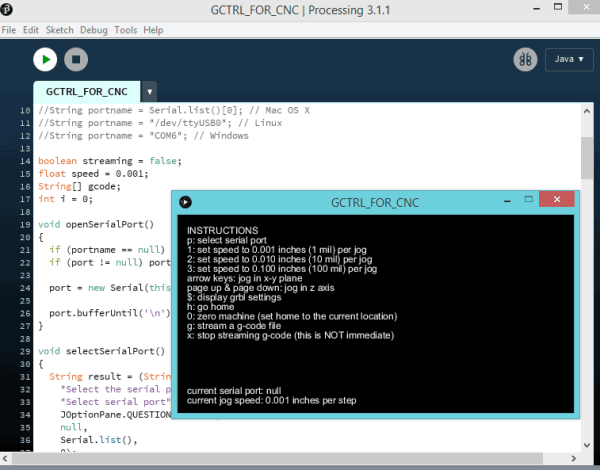
Теперь нажмите “g” на клавиатуре и выберите папку на компьютере, где у вас хранится ваш G-код. Выберите необходимый файл с G-кодом и нажмите enter. Если все соединения в схеме у вас сделаны правильно, то вы заметите как устройство (плоттер) начнет рисовать на бумаге.
Если вы хотите остановить процесс рисования, то просто нажмите “x” и плоттер остановит свою работу.
Базовые знания
Перед началом съемки необходимо ознакомиться с азами настройки камеры. В настоящее время в Интернете полно сайтов, где желающие могут самостоятельно подтянуть знания по основам работы фотографа. По большому счету, разобраться нужно с несколькими параметрами.
Светочувствительность (ISO), как следует из названия, определяет, насколько чувствительна камера к свету. Чем выше уровень светочувствительности, тем заметнее будут шумы (дефекты изображения); верна и обратная пропорциональность: чем ниже ISO, тем менее выражены шумы на фотографии. По словам специалистов, самые качественные изображения получаются тогда, когда съемка происходит на низких значениях ISO: 50, 100, 200. Верхний предел – ISO:400.
Следующий параметр – приоритет диафрагмы. Он представляет режим автоматического управления экспозицией фотоаппарата или видеокамеры, при котором автоматика бесступенчато выбирает выдержку затвора (время считывания кадра матрицей), в зависимости от установленной вручную диафрагмы. Для наиболее детального снимка выбор делается в сторону значения f11.
Наконец, последний основной параметр – скорость затвора или время, в течение которого затвор остается открытым и свет попадает на сенсор камеры. Если время выдержки невелико, можно «заморозить» движение.
Длинная выдержка позволяет получить «размазанное» движение (motion blur). Его часто применяют в рекламной фотографии автомобилей и мотоциклов, когда нужно передать ощущение скорости или движения автомобиля.
При выдержке более 1/60 камера чувствительна к сотрясению, и снимки могут получиться смазанными. Чтобы этого не произошло, при съемке с длинной выдержкой используется штатив.
Часто на камере в качестве значения выдержки бывает указан только знаменатель. Например, 125 означает скорость затвора 1/125 с. В значении выдержки знаменатель дроби должен, по меньшей мере, равняться фокусному расстоянию или быть больше него. Например, объективом 50 мм можно снимать с рук при выдержке не более 1/50 с, объективом 200 мм – не более 1/200 с.
 Программа может исправить огрехи съемки
Программа может исправить огрехи съемки
Обычный фотоаппарат
Для съемки можно использовать цифровые зеркальные камеры. Они позволяют сделать качественные универсальные фото. Причем для сканирования не потребуется покупка профессиональных моделей аппаратов. Так, с задачей справится и Nikon D5000 с разрешением матрицы 12,3 Мп. Более новые модели предложат и более качественные фото с высоким разрешением, но тогда придется пожертвовать временем обработки снимка. Кроме того, большинство цифровых камер имеют опцию сохранения изображений в формате RAW без сжатия, такой режим понадобится для более детального сканирования выбранного объекта.
В принципе для сканирования модели подойдут даже «мыльницы» и камеры смартфонов. Многие из них дают возможность съемки в ручном режиме, так что, если человек разбирается в азах съемки, можно использовать и менее продвинутые устройства.
Автокликер для 1С Промо
Внешняя обработка, запускаемая в обычном (неуправляемом) режиме для автоматизации действий пользователя (кликер). ActiveX компонента, используемая в обработке, получает события от клавиатуры и мыши по всей области экрана в любом приложении и транслирует их в 1С, получает информацию о процессах, текущем активном приложении, выбранном языке в текущем приложении, умеет сохранять снимки произвольной области экрана, активных окон, буфера обмена, а также, в режиме воспроизведения умеет активировать описанные выше события. Все методы и свойства компоненты доступны при непосредственной интеграции в 1С. Примеры обращения к компоненте представлены в открытом коде обработки.
1 стартмани
Миф второй: прямой экспорт CAD-данных
Следующее распространенное заблуждение – это возможность прямого экспорта CAD-данных. Многие полагают, что сразу после проведения 3D-сканирования у вас уже либо будет готовая CAD-модель, либо вы без труда сможете загрузить данные в систему и начать с ними работать. Но это далеко не так. Большинство 3D-сканеров выводят данные в виде облака точек, каждой из которых присвоены значения координат XYZ и, возможно, вектор нормали. Также данные могут быть представлены как полигональная сетка в триангулированном виде (формат STL) или, если вы проводите цветное сканирование, в формате OBJ с текстурной картой. Иными словами, полученные результаты еще не являются CAD-данными.
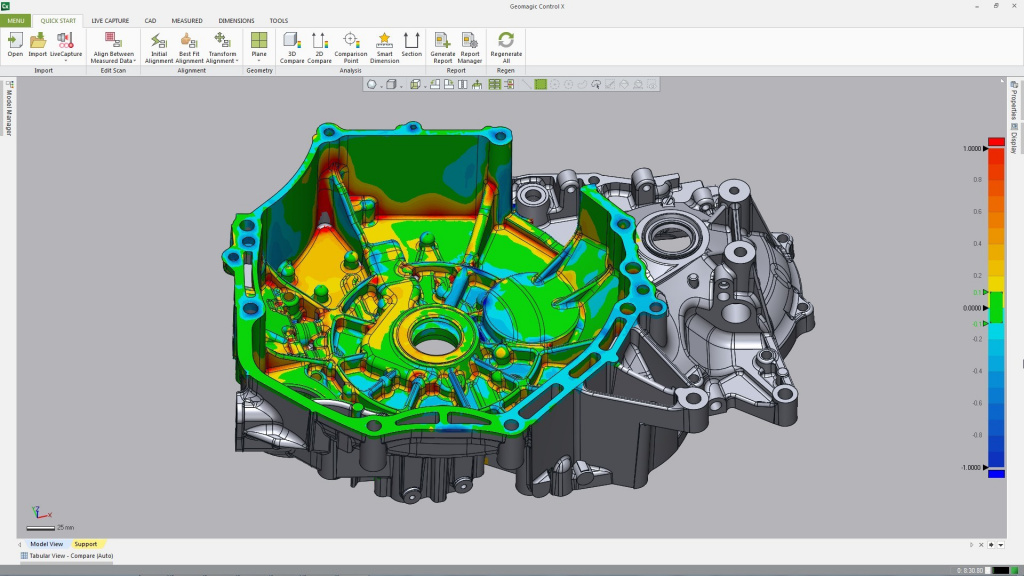
Реверс-инжиниринг отсканированного объекта в программном продукте Geomagic Design X
Во-вторых, большинство CAD-систем не предназначены для работы с «сырыми» данными вышеперечисленных форматов. Конечно, вы сможете импортировать данные сканирования в систему, но сделать с ними ничего не получится. Система не позволит масштабировать объект или разбить его на секции, не говоря уже о более сложных операциях. Сегодня некоторые CAD-системы оснащены программным обеспечением для обратного проектирования, однако большая часть систем, с которыми мы сталкивались, недостаточно эффективны. Даже самые продвинутые из них оставляют желать лучшего. Однако с подобными задачами прекрасно справляются специальные программы для обратного проектирования, например, Geomagic Design X. Часть из них созданы самими производителями сканеров, однако существуют и множество сторонних приложений.
Таким образом, большинство встроенных функций просто не работают в CAD-системах. Не существует специальной кнопки, позволяющей сразу же создать CAD-модель из полученных результатов. Чтобы перейти от триангулированных данных к реальной CAD-модели, управляемой функциональностью или поверхностными характеристиками, требуются специальные навыки и программное обеспечение. Поэтому миф о том, что можно напрямую вносить данные сканирования и работать с ними в большинстве CAD-систем, не соответствует действительности. Вы не сможете выполнить с «сырыми» результатами сканирования никаких действий, будь это реверс-инжиниринг или контроль геометрии, для которых также требуется предварительная обработка данных.
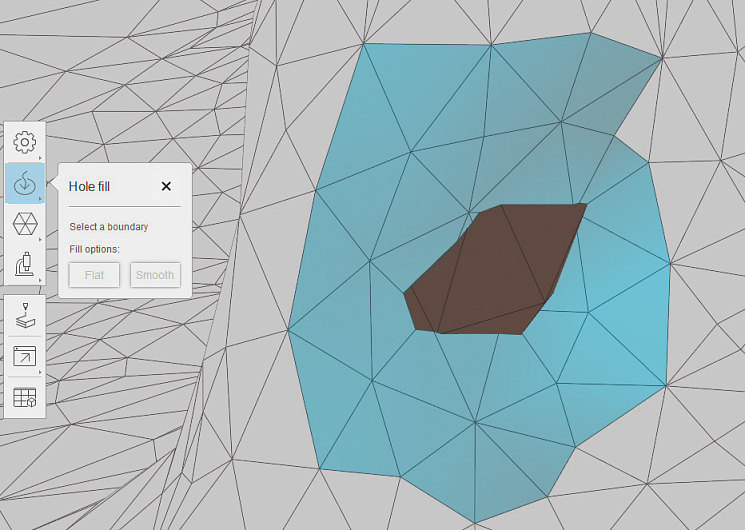
Как сшиваются части модели при использовании стационарного 3D-сканера?
При одной установке на поворотном столе стационарного сканера участки захваченной в разных ракурсах геометрии сшиваются автоматически, поскольку деталь не сдвигается относительно стола при его повороте и захвате ракурсов-участков геометрии детали. А после переустановки модели производится сшивание уже промежуточных сканов по характерным особенностям геометрии, которые могут быть выделены на двух полученных сканах с разных установок.
После того, как были выделены характерные точки сканов с двух установок, программа по очень большой выборке два этих участка геометрии сшивает с высокой точностью, при этом показывая ошибку совмещения, которая при этом неизбежно возникнет. Но для этого нужно указать некие характерные особенности геометрии, присутствующие на обоих сшиваемых в пару сканах: царапину, которую захватил сканер, или заусенец, или несимметрично расположенные отверстия. Если деталь идеально осесимметричная, скажем, вал, но его нужно сканировать с двух установок – такое бывает, – то вам, может быть, нужно просто наклеить позиционную метку или закрепить кусок пластилина на модели, и потом использовать его как ориентир. А отверстие, которое вы получите после вырезания со скана этого куска пластилина или метки, можно даже не закрывать, поскольку при обратном проектировании все равно останется большая выборка данных с 3D-сканера, описывающих эту цилиндрическую поверхность.
Если вам нужно сразу печатать модель, сделав ее герметичной, программа Geomagic Design X и даже ПО ezScan, идущее в комплекте с 3D-сканерами Solutionix, позволяет закрывать отверстие. Если это делается программно в полигональной модели без построения параметрической, отверстие может быть очень точно закрыто по образующей, например, цилиндра, и этот кусок пластилина не будет представлять проблем. Такой прием используется для сканирования, сшивания деталей без особенностей геометрии. При наличии особенностей геометрии программа будет по очень большой выборке сшивать два скана, подгоняя их взаимное расположение, поскольку вы должны сканировать так, что площадь перекрытия двух сканов с двух установок будет очень большая, что обеспечивает большую выборку данных для совмещения.
Описанные здесь принципы сшивания сканов, приемы сканирования симметричных объектов, например, вырезание со скана ориентира в виде куска пластилина или позиционной метки, актуально и для процесса сканирования ручными 3D-сканерами, кроме тех, что связаны с автоматическим поворотным столом.
Классификация лазерных 3D сканеров
Трехмерное сканирование подразделяется на 2 типа:
- Контактное. Метод представляет собой контакт с предметом.
- Бесконтактное. Перспективный метод сканирования, так как позволяет создавать скан моделей, находящихся в труднодоступных местах.
Бесконтактные подразделяются на 2 категории:
- Активные;
- Пассивные.
Контактные
Механический щуп соединен с контактами в сканере. Он снабжен датчиком, который измеряет высоту, глубину объекта. Координаты собраны в сетке, которые можно регулировать из программы. Механизмом могут допускаться угловые перемещения для впадин и отверстий. Процесс можно ускорить самостоятельно, изменяя шаги сетки: уменьшать сложные участки, повысив точность и сокращая время.
Данные устройства работают по следующему принципу: происходит зондирование предмета при помощи физического контакта, когда тот находится на прецизионной проверочной поверхности. Отличается от других видов сверхточной работой. Недостаток – может изменить или повредить объект. Такие сканеры проводят изучение объекта напрямую. Если объект лежит неправильно или двигается во время сканирования, его удерживают в неподвижном состоянии специальные тиски.
 Пример контактного 3D сканера
Пример контактного 3D сканера
В таком 3D сканере используется 3 вида механизма:
- Каретка. Измерительная «рука», которая находится в неподвижном перпендикулярном положении. Исследование происходит в момент движения каретки, когда «рука» двигается вдоль объекта. Хороший метод сканирования плоских и выпуклых деталей.
- Высокочастотный угловатый датчик. Сканирует внутреннее пространство объекта с углублениями и входными отверстиями. Производит сложнейшие математические вычисления.
Использование этих двух механизмов помогает собирать информацию с крупных предметов, имеющих поперечные перегородки и несколько внутренних отсеков.
Координатно-измерительная машина. Именно этот механизм сверхточно читает предмет и способен повредить или деформировать его. Такие минусы машины учитываются при сканировании исторических и хрупких объектов.
Бесконтактные
В основе сканирования таким аппаратом лежит метод изучения предметов при помощи ультразвука и рентгеновских лучей. Процесс происходит путем отражения светового потока. Это может быть обычный свет или определенное излучение. Только после этого объект подвергается цифровому исследованию.
Зачастую сканируемые объекты находятся в освещенных местах. В таком случае используют отражение света в видимом диапазоне. Из этого следует, что бесконтактные 3D сканеры сравнимы с версией видеокамеры. Но такой освещенности недостаточно для подробного анализа, так как свет может распространяться неравномерно. В качестве дополнений используются специальные осветители, при этом увеличивается стоимость, и теряется компактность и мобильность.
 Бесконтактный 3D сканер
Бесконтактный 3D сканер
Пассивные
Такие трехмерные сканеры анализируют отраженное излучение через свет. В качестве святилища используется лазерный луч, в основе которого имеется времяпролетный дальномер. Он рассчитывает расстояние и время движения луча туда и обратно. Используется как световой всплеск, а время его отражения фиксируется при помощи детектора. Как известно, скорость света неизменная величина, и, зная время полета луча в обе стороны, можно подсчитать расстояние от сканера до объекта. За 1 секунду времяпролетные 3D сканеры могут измерить до 100 000 точек.
Активные
Сканирование объектов происходит путем направления волн, представленных в виде лазерного луча или структурированного света. Далее наступает обнаружение и анализ отражения. Сканер отправляет луч на предмет, а камера записывает данные о расположении в координатах. Движение лазера сопровождается фиксацией в поле зрения камеры в разных местах. Такие трехмерные сканеры прозвали триангуляционными, так как луч, камера и конечная точка образуют треугольник.
3D-сканер помогает пострадавшим
К сожалению, по всему миру неизбежно происходят трагедии, и пострадавшие нуждаются в помощи. Но, к счастью, существуют такие организации, как «Врачи без границ» (Médecins Sans Frontières), которые делают все возможное, чтобы предоставить им необходимое лечение и уход. С 2016 года организация прилагает неустанные усилия, пытаясь решить проблему обеспечения протезами нуждающихся во всем мире. Цель – помочь людям с ампутированными конечностями вновь обрести самостоятельность. Решения, которые при этом используются, – 3D-технологии.
По завершении медицинского обследования пациента врачи определяют его потребности и ожидания. С помощью сканера peel 3d, с минимальным дискомфортом для пострадавшего, создается высокоточная цифровая модель поврежденной конечности. По сравнению с традиционно используемым созданием слепков 3D-сканирование выполняется значительно быстрее и не требует контакта. Затем результат 3D-сканирования переносится в программное обеспечение для виртуального проектирования приемной гильзы и протеза. Разработанный компонент изготавливается на 3D-принтере и устанавливается на конечность пациента. Если необходимо, в процессе установки протез и гильза дорабатываются. Через три месяца использования пациент приглашается для оценки удобства протеза.
Специалисты «Врачей без границ» также разработали похожую процедуру для создания компрессионных масок для пациентов с ожогами. Здесь использование бесконтактной технологии также дает значительные преимущества по сравнению с традиционными гипсовыми бинтами, не только делая процедуру менее болезненной для пациента, но и ускоряя ее, что позволяет обеспечить помощью гораздо большее количество людей в нуждающихся странах.

Физиотерапевт Пьер Моро сканирует пациента с ожогами головы. Затем на основе скана создается прозрачная маска для прессотерапии / Фото: Elisa Oddone, Al Jazeera
Рассказывает физиотерапевт Пьер Моро, сотрудник «Врачей без границ»: «Цель проекта с использованием 3D-технологий – оказание помощи пациентам, нуждающимся в специальном реабилитационном уходе. Мы запустили этот проект в Аммане в 2017 году, где мы начали обеспечивать пациентов с ампутированными верхними конечностями протезами, напечатанными на 3D-принтере. Но просто напечатать протез недостаточно – мы стараемся понять потребности пострадавших, найти индивидуальные решения и как можно дольше поддерживать их в новом положении. Нам помогает междисциплинарная команда реабилитационных работников и инженеров. Тогда наши специалисты помогли более 30 пациентам в Иордании.
В 2018-м мы начали использовать технологию еще в одном направлении – для пациентов с ожогами, особенно на лице и шее. Осложнения на коже – весьма серьезная проблема для пострадавших от ожогов. Могут образоваться гипертрофические рубцы, и нужна прессотерапия. Для этого требуются прозрачные маски, но их довольно сложно изготовить на месте. Поэтому мы начали осваивать 3D-сканирование, 3D-печать и компьютерное моделирование, пытаясь помочь нашей команде в производстве этих устройств для пациентов, которым они так необходимы. Сейчас мы предоставляем более 50 прозрачных лицевых ортезов.
Когда я думаю об этом проекте, мне всегда вспоминается одна история, демонстрирующая его развитие. В 2017 году в Иордании у нас была маленькая пациентка с ожогами и ампутацией – у нее не было руки, и состояние ее оставшейся части было слишком сложным, чтобы . Тогда мы не смогли ей помочь. Но она вернулась в следующем году, и мы наконец-то смогли изготовить для нее протез. Впервые она смогла пользоваться рукой. Это одно из наших лучших воспоминаний о проекте и показатель его успеха».
Шаг 8. Сканирование объекта
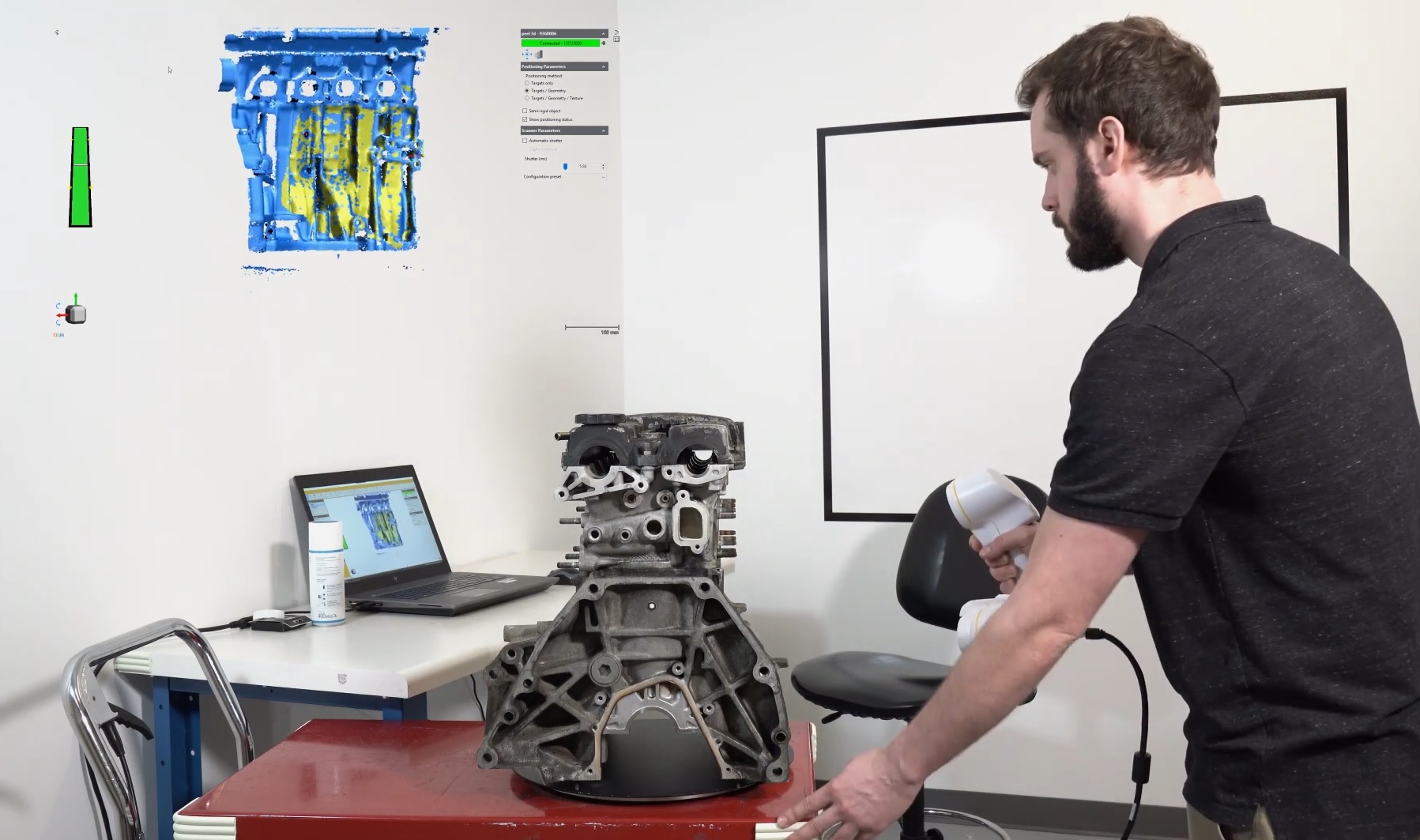
Нажмите на «Сканировать» (Scan). Удерживайте желтую кнопку и, соблюдая адекватную дистанцию (порядка тридцати сантиметров от объекта), начинайте процесс сканирования.
Слева на фото вы видите полосу. Если она горит зеленым, вы находитесь на правильном расстоянии. Желтым — слишком близко, синим — слишком далеко.
Приступайте к сканированию. Нужно обойти вокруг объекта, чтобы запечатлеть отдельные выпуклости и щели и чтобы сканер «увидел» каждую деталь целиком. Однако здесь он прекрасно считывает геометрию и с одной-двумя метками, которые мы наклеили на объект.
Отслеживание может прерваться. В таком случае на экране появится оповещение, показывающее статус позиционирования. При прерывании отслеживания вы можете просто вернуться к детали с метками или к детали, которую вы сканировали ранее, и 3D-сканер восстановит процесс отслеживания, а вы сможете продолжить сканирование. Перед нами довольно сложный объект, но вы можете видеть, что устройство выполняет отслеживание очень хорошо.
Плата Arduino Mega 2560
Устройство Arduino Mega 2560 собрано на микроконтроллере ATmega 2560 (datasheet), является обновлённой версией Arduino Mega.
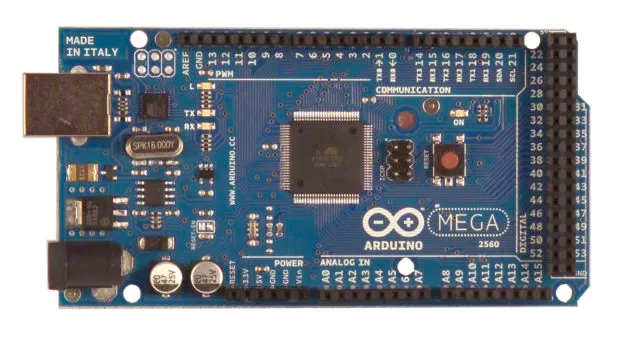
Для осуществления преобразования USB–UART-интерфейсов используется новый микроконтроллер ATmega 16U2 ( либо ATmega 8U2 для версий плат R1 или R2).
Состав платы следующий:
- количество цифровых входов/выходов составляет 54 (15 из них можно использовать в роли выходов-ШИМ);
- число аналоговых входов – 16;
- реализация последовательных интерфейсов производится посредством 4 аппаратных приёмопередатчиков UART;
- 16 МГц – кварцевый резонатор;
- USB-разъём;
- питающий разъём;
- внутрисхемное программирование осуществляется через ICSP-разъём;
- кнопка для сброса.
В устройстве Mega 2560 R2-версии добавлен специальный резистор, подтягивающий HWB-линию 8U2 к земле, что позволяет значительно упростить переход Arduino в DFU-режим, а также обновление прошивки. Версия R3 незначительно отличается от предыдущих. Изменения в устройстве следующие:
- добавлены четыре вывода – SCL, SDA, IOREF (для осуществления совместимости по напряжению различных расширительных плат) и ещё один резервный вывод, пока не используемый;
- повышена помехоустойчивость по цепи сброса;
- увеличен объём памяти;
- ATmega8U2 заменён на микроконтроллер ATmega16U2.
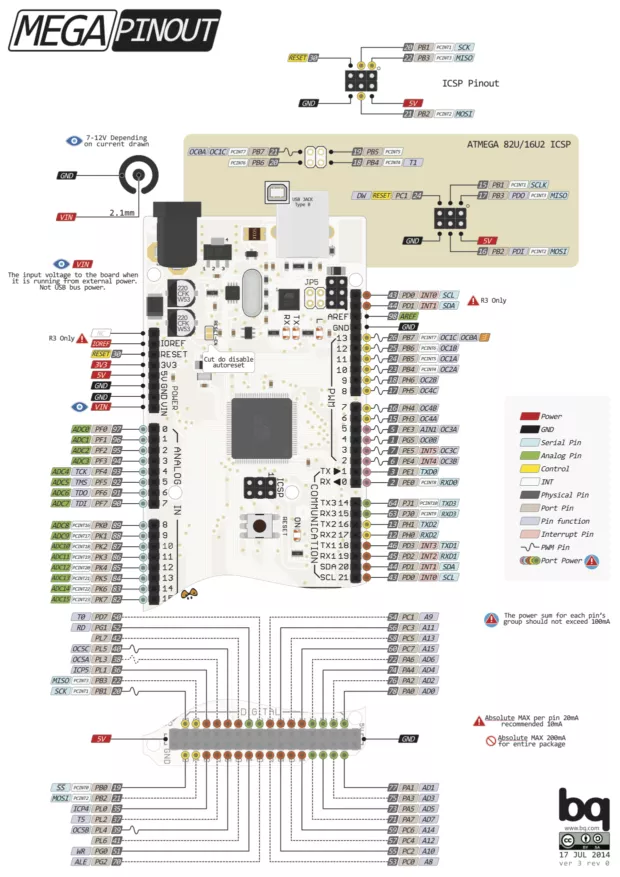
Выводы Arduino Mega 2560R3 предназначаются для следующего:
- Имеющиеся цифровые пины могут служить входом-выходом. Напряжение на них – 5 вольт. Каждый пин обладает подтягивающим резистором.
- Аналоговые входы не оснащены подтягивающими резисторами. Работа основана на применении функции analog Read.
- Количество выводов ШИМ составляет 15. Это цифровые выводы №2 – №13, №44 – №46. Использование ШИМ производится через функцию analog Write.
- Последовательный интерфейс: выводы Serial: №0 (rx), №1 (tx); выводы Serial1: №19 (rx), №18 (tx); выводы Serial2: №17 (rx), №16 (tx); выводы Serial3: №15 (rx), №14 (tx).
- Интерфейс SPI оборудован выводами №53 (SS), №51 (MOSI), №50 (MISO), №52 (SCK).
- Вывод №13 – встроенный светодиод.
- Пины для осуществления связи с подключаемыми устройствами: №20 (SDA), №21 (SCL).
- Для внешних прерываний (низкий уровень сигнала, другие изменения сигнала) используются выводы №2 , №3, №18, №19, №20, №21.
- Вывод AREF задействуется командой analog Reference и предназначается для регулирования опорного напряжения аналоговых входных пинов.
- Вывод Reset. Предназначен для формирования незначительного уровня (LOW), что приводит к перезагрузке устройства (кнопка сброса).
Делаем 3D сканер с помощью веб-камеры
Для того чтобы изготовить самодельный 3d сканер, вам понадобится:
- качественная вебка;
- линейный лазер, то есть приспособление, испускающее лазерный луч (для получения качественного сканирования лучше, чтобы луч был как можно тоньше);
- разные крепления, в том числе и угол для калибровки;
- специальное программное обеспечение для обработки отсканированных снимков и данных.
Учтите, что без соответствующего ПО вам не удастся создать цифровую модель объектов и предметов. Поэтому изначально позаботьтесь о наличии специальных программ. К примеру, базовыми считаются DАVID-lаserscаnner и TriAngles, но они нуждаются в применении вращающейся поверхности.
Начните с калибровочного угла. Для его создания напечатайте шаблон (он входит в комплект программы). Разместите его таким образом, чтобы он создал угол в 90 градусов
Важно, чтобы во время печати соблюдался правильный масштаб. Для этого воспользуйтесь калибровочной шкалой
Калибровку камеры делают в автоматическом или ручном режиме, это также предусматривается ПО.
Чтобы отсканировать предмет, его необходимо будет разместить в калибровочном углу, а напротив установить веб-камеру
Важно поместить объект точно по центру изображения на экране. В настройках вебки нужно отключить все автоматические корректировки
Также с их помощью устанавливается цвет лазерного луча. Нажимая «Старт», совершаются плавные движения. Лучом нужно обвести предмет со всех сторон. Это будет первый цикл сканирования. В дальнейшем необходимо менять положение лазера, чтобы охватить все необработанные в предыдущий раз точки.
По завершении всех процессов сканирование останавливается и выбирается режим «показа в 3D» в программе. Если у вас нет под рукой лазера, его можно заменить источником яркого света. Он обеспечит проецирование теневой линии. Правда, в таком случае поменяйте в программе настройки, которые будут соответствовать данным параметрам.
GSM модуль
В качестве модуля обмена информацией через сотовые сети связи, в проекте умного дома на Ардуино, используется GSM SIM900. Выбран шилд по причине его аналогичности питания 5 В, для совместного подключения с микроконтроллером к резерву.
Обмен информацией между GSM900 и Arduino выполняется по последовательному порту. В схеме, аппаратный D0 занят реле экономии, D1 отоплением. Будет использоваться программный порт на цифровых пинах 7 и 8. Питание с Ардуино раздельно, электрическая взаимосвязь выполняется через GND модема и аналогичную линию микроконтроллера.
Запуск аппарата будет производиться программно. Для чего в GSM900 запаивается перемычка R13 и пин D9 модема соединяется с D13 Ардуино.
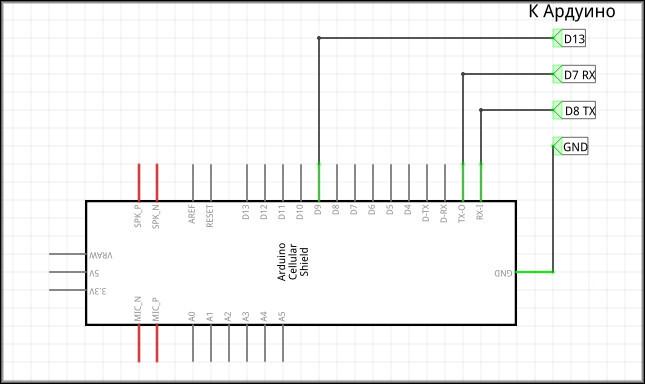
Обратите внимание, что соединение коммутирующих линий TX-RX выполняется перекрестно. Скетч включения GSM SIM900:
Скетч включения GSM SIM900:
void Modem_on() { pinMode(13, OUTPUT); digitalWrite(13,LOW); delay(1000); digitalWrite(13,HIGH); delay(2000); digitalWrite(13,LOW); delay(3000); }
Какие задачи строительной отрасли можно оптимизировать с помощью 3D-сканеров и программного обеспечения?
-
Авторский и технический надзор в процессе и по завершении строительства, включая сравнение облаков точек с BIM-моделями и с другой проектной документацией.
-
Восстановление и актуализация документации, когда нет чертежей и других данных по существующему объекту. 3D-сканеры совместно с программами As-Built или плагинами As-Built для AutoCAD/Revit применяются для создания BIM-моделей или чертежей на основе отсканированных данных.
-
Контроль коллизий: подразумевает проектирование новых элементов в существующих объектах, что особенно актуально в промышленном строительстве, когда производится реконструкция сложных металлоконструкций, среди которых необходимо построить новый трубопровод, добавить новую установку и т.п. Программа позволяет среди облака точек строить новые модели и выявлять коллизии – пересечения облака точек и реального объекта.
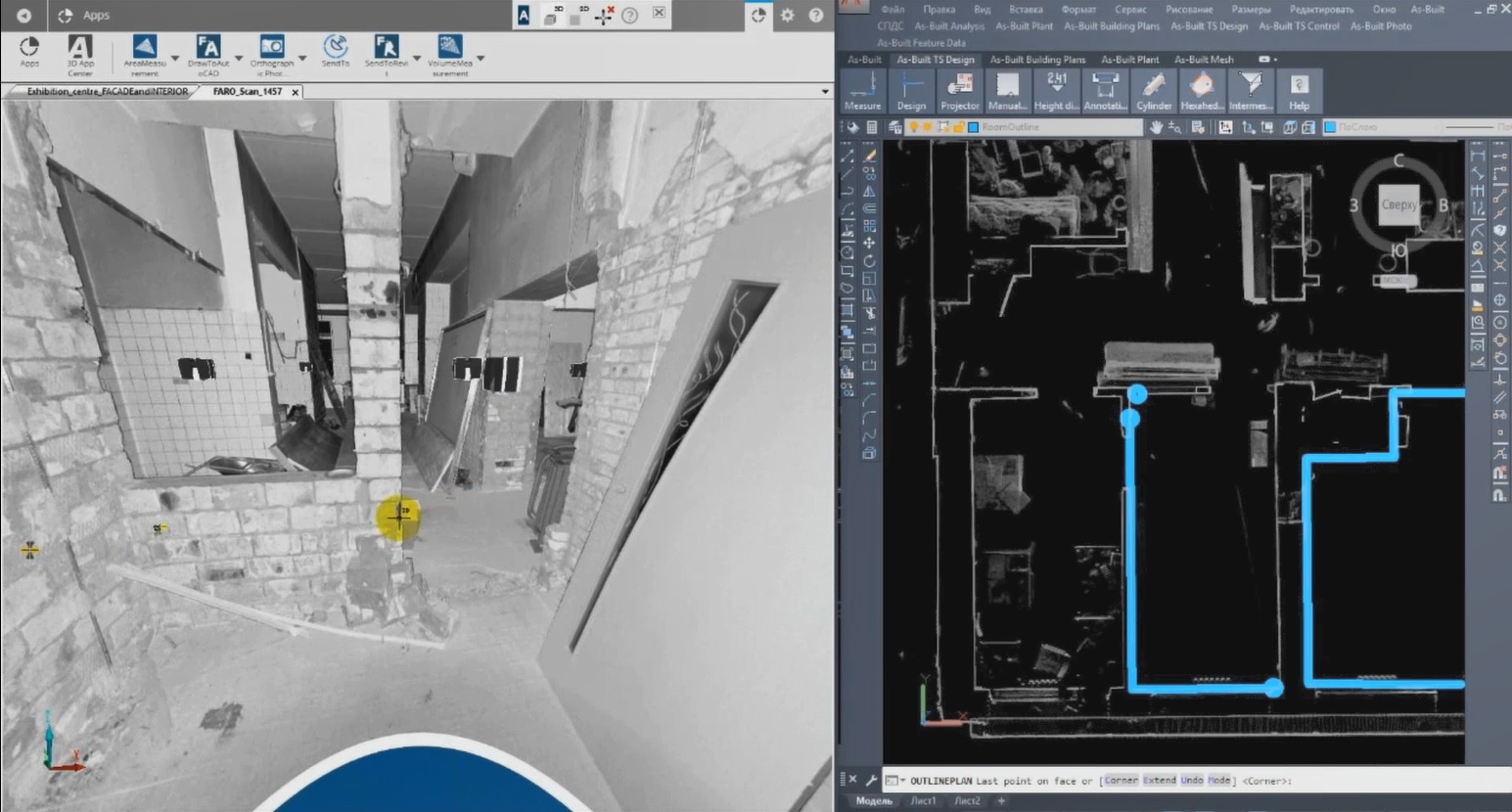
Один из этапов работы в FARO As-Built
Указывая необходимые точки на панораме, мы можем делать нужные нам сечения в облаке. Программа дает возможность удобно перемещаться внутри панорамы. Перемещаясь в необходимое помещение, производим отрисовку его плана с помощью соответствующего инструмента плагина As-Built
Похожие записи:
 Как правильно и под каким углом заточить диск циркулярной пилы
Как правильно и под каким углом заточить диск циркулярной пилы
 Литье алюминия
Литье алюминия
 Таблетки с «щупальцами»
Таблетки с «щупальцами»
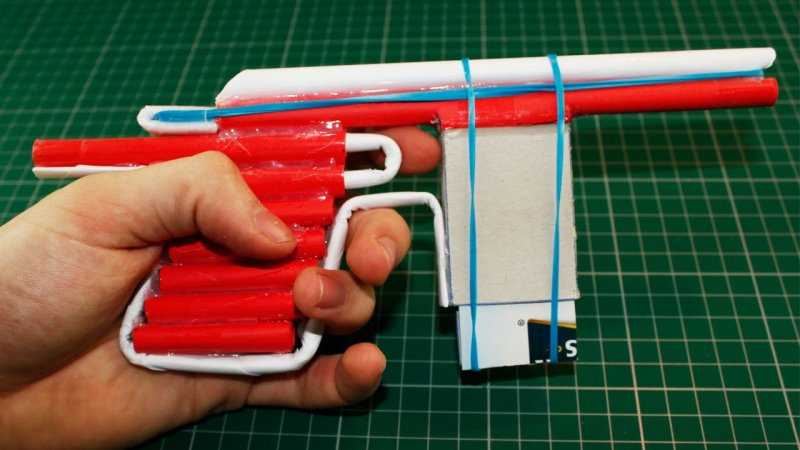 Самодельный пистолет из дерева
Самодельный пистолет из дерева
 Как сделать обложку своими руками: как изготовить переплет быстро и просто для различных форматов (110 фото)
Как сделать обложку своими руками: как изготовить переплет быстро и просто для различных форматов (110 фото)
 Назначение контроллера для электровелосипеда, устройство, принцип работы
Назначение контроллера для электровелосипеда, устройство, принцип работы